title: “Робот, обученный на неидеальных видео с теннисом, обыграл своего учителя-человека” description: “Система LATENT демонстрирует, как роботы могут учиться сложным движениям из несовершенных данных и превосходить своих наставников” author: “Редакция RoboHorizon” date: “2026-03-15” image: “/images/shared/news/2026-03-15-image-2-4cab0160.webp” tags: [“робототехника”, “искусственный интеллект”, “машинное обучение”, “теннис”, “humanoid”]
В повороте событий, который не должен удивлять никого, кто следит за новостями, исследователь создал робота, который настолько хорошо освоил новый навык, что тут же одержал победу над своим человеческим учителем. Видом спорта стал теннис, а проект под названием LATENT научил гуманоида играть не на основе безупречных профессиональных данных, а на основе несовершенных видеозаписей движений человека. Результат — робот, способный уверенно поддерживать затяжные розыгрыши.
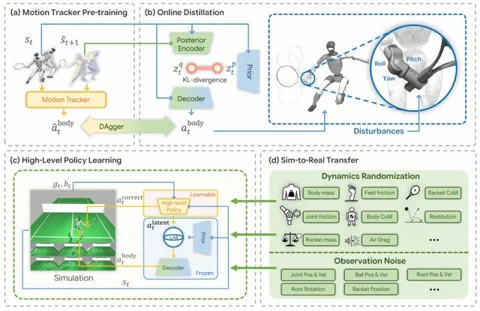
Проект, возглавляемый исследователями из Тсинхуатского университета и Galbot Inc., взялся за главную проблему робототехники: обучение сложным, ловким движениям без идеального руководства к действию. Их система осваивает «латентное пространство действий» на основе фрагментированных, неидеальных человеческих движений в теннисе. Секретный ингредиент — высокоуровневая политика ИИ, которая работает как цифровой тренер, исправляя и комбинируя эти несовершенные базовые навыки для успешного возврата мяча через сетку. Весь этот процесс оттачивается в симуляции, а затем переносится на реального гуманоидного робота Unitree G1 с помощью технологии sim-to-real.
Доказательство — в результатах, то есть в этом случае — в счете. По словам ведущего автора Чжикай Чжана, кривая обучения была крутой. «В первый день реальных испытаний робот не мог вернуть ни одного мяча, который я подавал», — заявил Чжан. «К последнему дню проекта я больше не мог его обыграть». Тем, кто хочет погрузиться в технические детали или, возможно, обучить своего собственного теннисного повелителя, команда сделала детали проекта и код доступными. Ссылка: Страница проекта и Ссылка: GitHub-репозиторий.
