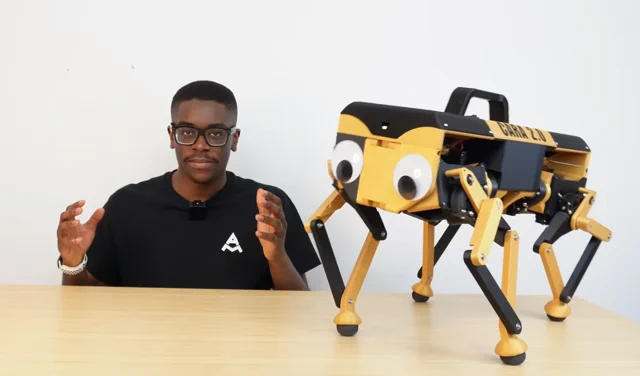
O maker e YouTuber Aaed Musa está de volta com um upgrade de peso — ou melhor, com muito menos peso — em seu peculiar cão-robô movido a cabos. E os números impressionam. O novo CARA 2.0, fruto de um projeto de conclusão de curso de engenharia, conseguiu a proeza de reduzir o custo de seu antecessor em mais de 50%, caindo de salgados US$ 3.000 para mais palatáveis US$ 1.450. Além disso, o robô passou por um regime rigoroso: perdeu 42% de sua massa, baixando de 14,25 kg para enxutos 8,26 kg. Ele é o sucessor do CARA: A revolução dos robôs quadrúpedes movidos a cabos original, que chamou a atenção da comunidade pelo uso engenhoso de sistemas de tração por cabrestante (capstan drives) com folga zero.

Desenvolvido em equipe como um projeto de graduação, o CARA 2.0 atinge uma velocidade de caminhada de 0,55 m/s e consegue carregar uma carga útil de 6,8 kg por cerca de uma hora. O objetivo ambicioso do grupo era quebrar a barreira dos mil dólares, e embora não tenham chegado lá, o valor final de US$ 1.450 para um quadrúpede dinâmico de nível hobby é algo que impõe respeito. A economia veio de sacadas inteligentes: trocar tubos caros de fibra de carbono por estruturas impressas em 3D e utilizar motores de drone mais baratos — que a equipe teve que rebobinar manualmente para triplicar o torque de saída.
Por que isso é importante?
Aqui vem a reviravolta: apesar do sucesso do projeto, Musa está oficialmente aposentando a tecnologia que deu nome ao robô. CARA é o acrônimo para “Capstans Are Really Awesome” (Cabrestantes são Incríveis), mas após finalizar a construção, o engenheiro concluiu que eles são, de fato, incríveis, porém profundamente impraticáveis. No encerramento do projeto, ele declarou que está deixando o design de lado e não pretende usar sistemas de cabos no futuro, lamentando que eles “simplesmente não são amigáveis na hora da montagem”.
É uma lição clássica de engenharia aprendida no campo de batalha. Um design pode ser brilhante no papel — oferecendo performance de ponta e precisão absoluta —, mas se for um pesadelo para montar e manter, acaba se tornando um beco sem saída para aplicações práticas. Musa já adiantou que, para seu próximo quadrúpede, usará “atuadores prontos de prateleira”. É uma conclusão pragmática, e até um pouco melancólica, para um projeto que conseguiu criar um cão-robô melhor e mais barato, apenas para revelar que sua tecnologia base era uma premissa belíssima, porém falha. Você pode conferir todos os detalhes técnicos na página do projeto de Musa.