No dia 9 de abril de 2026, o Escritório de Patentes e Marcas dos EUA (USPTO) publicou um registro da Tesla, Inc. que quase ninguém estava à espera. A patente US20260097493A1 estende-se por vinte páginas, aponta o engenheiro mecânico sênior Rod Jafari como seu único inventor e descreve, pura e simplesmente, um joelho. Não há redes neurais, modelos de mundo ou promessas de condução autónoma. Apenas dois elos de ligação, um atuador linear e quatro pivôs organizados de uma forma específica para fazer um humanoide caminhar sem levar a empresa à falência.
O pedido foi depositado originalmente em 30 de setembro de 2022, no mesmo dia em que a Tesla realizou o seu segundo “AI Day” e apresentou o protótipo “Bumble-C”. Naquela noite, um engenheiro descreveu o joelho do robô como uma “articulação de ligação de quatro barras” inspirada na biologia humana. Três anos e meio depois, o registo oficial de patentes finalmente alcançou a realidade técnica. Este é, quase certamente, o joelho que sustenta o “Optimus 3”, que o CEO Elon Musk confirmou estar a dar os seus primeiros passos numa publicação no X no final de março de 2026. O detalhe mais revelador da patente não é o design final, mas sim o diagrama que mostra como lá chegaram.
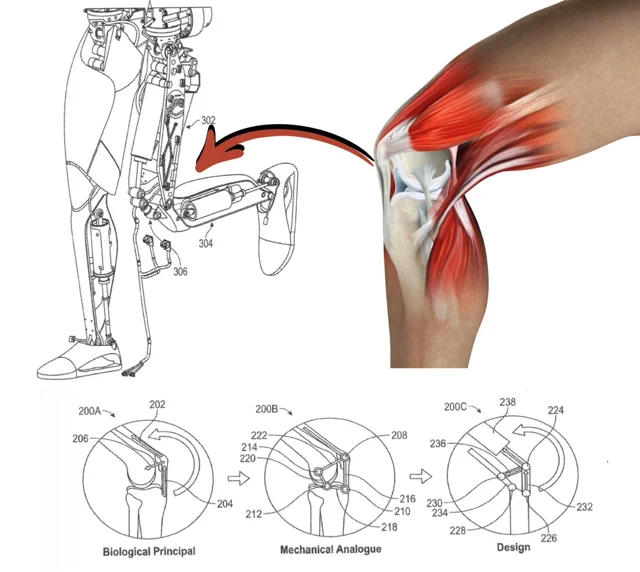
A FIG. 2 da patente é uma espécie de “história de origem” em três painéis, evoluindo de um “Princípio Biológico” (um joelho humano), passando por um “Análogo Mecânico” (uma ligação abstrata), até ao “Design” final. É raro ver uma patente expor o seu raciocínio de forma tão transparente. O desenho afirma categoricamente: a razão para esta peça ter este formato é porque copiámos algo que já funciona excecionalmente bem na natureza. O mecanismo, uma variante modificada da ligação de Hoecken invertida, mimetiza o joelho humano para alcançar uma amplitude de movimento massiva de cerca de 150°, utilizando apenas um único e pequeno atuador.

O joelho biológico é um prodígio de eficiência. A rótula (patela) funciona como uma polia móvel, alterando a alavancagem do músculo quadríceps para entregar o torque máximo exatamente no momento mais crítico da passada. Além disso, a articulação não gira sobre um único ponto fixo; o seu centro de rotação desloca-se — um truque geométrico gerido pelos ligamentos cruzados que funcionam, mecanicamente, como uma ligação de quatro barras. A patente da Tesla herda estas duas propriedades — um braço de alavanca móvel e um pivô não fixo — para criar uma articulação brutalmente eficiente. O documento observa que uma pequena rotação de 60 graus no atuador se traduz num arco angular enorme para a parte inferior da perna.

Por que é que isto é importante?
Não se trata apenas de engenharia astuta; é a peça-chave para fabricar humanoides em escala industrial. Toda a filosofia de design detalhada na patente foca-se na redução de custos. Um único atuador linear é mais barato, mais leve e mais simples do que uma articulação com múltiplos motores. A sua eficiência energética permite o uso de uma bateria menor e mais leve, reduzindo ainda mais a massa total e o custo do robô. Quando o objetivo declarado é vender o Optimus por valores entre 20.000 € e 30.000 €, cada grama e cada euro poupado numa articulação é multiplicado por milhões de unidades produzidas.
Este é o tipo de engenharia “pé no chão” que faz com que o plano da Tesla — substituir as linhas de produção do Model S e Model X na fábrica de Fremont por uma linha de montagem do Optimus — pareça um pouco menos insano. O design em si não é totalmente inédito; analistas notaram que o humanoide IRON de próxima geração da Xpeng, revelado no final de 2025, utiliza uma ligação de Hoecken invertida surpreendentemente semelhante no seu joelho. No entanto, com o design da Tesla a ser público desde o AI Day de 2022, este parece ser um caso de evolução convergente em direção a uma solução ideal, e não mera imitação.
A evolução teve milhões de anos para aperfeiçoar esta geometria. A Tesla tem de o fazer com um orçamento apertado e contra o relógio. Esta patente é um vislumbre de como a empresa planeia ganhar essa corrida.