
Quando você achava que a câmera do seu celular servia apenas para registrar fotos tremidas em shows, pesquisadores decidiram transformá-la em um scanner 3D de alta precisão em tempo real. A Robbyant, divisão de IA incorporada (embodied AI) do Ant Group, acaba de liberar o código do LingBot-Map, um novo modelo fundacional de 3D capaz de reconstruir ambientes detalhados e em larga escala a partir de um simples streaming de vídeo. O detalhe que impressiona? Ele faz tudo isso a 20 quadros por segundo, uma velocidade que faz os métodos tradicionais de fotogrametria parecerem uma tartaruga em dia de preguiça.
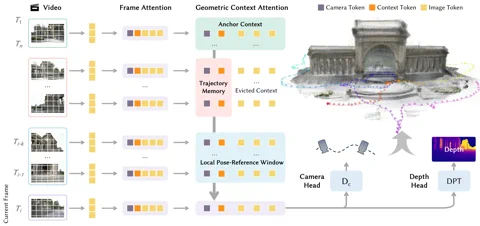
O “pulo do gato” está em uma arquitetura inédita batizada de Geometric Context Transformer (GCT). Não se trata de apenas mais um transformer adaptado para visão computacional; o GCT foi projetado especificamente para atacar o calcanhar de Aquiles dos sistemas SLAM monoculares (de câmera única): o desvio, ou drift. Ele gerencia as informações geométricas de forma inteligente através de três mecanismos de atenção paralelos: um contexto de âncora para estabilização de coordenadas, uma janela de referência de pose local para detalhes minuciosos e uma memória de trajetória para corrigir erros em percursos longos. Isso permite que o LingBot-Map processe sequências que ultrapassam 10.000 quadros com o que a Robbyant descreve como uma “precisão praticamente inalterada”. O projeto já está disponível no GitHub. Hyperlink: Robbyant/lingbot-map
As promessas de desempenho são, para dizer o mínimo, audaciosas. No desafiador dataset Oxford Spires, o LingBot-Map atingiu um Erro de Trajetória Absoluto de apenas 6,42 metros — uma melhoria de quase 2,8 vezes em relação ao melhor método de streaming anterior. Ele chega a superar até métodos offline consagrados, que têm o luxo de processar todas as imagens de uma vez. No benchmark ETH3D, o modelo alcançou uma pontuação F1 de 98,98, atropelando o segundo colocado por uma margem de mais de 21 pontos percentuais. Para os entusiastas que gostam de mergulhar nos detalhes técnicos, a metodologia completa foi detalhada em um artigo no arXiv. Hyperlink: Read the paper on arXiv
Por que isso é importante?
O LingBot-Map representa um passo gigantesco na democratização da inteligência espacial. Ao eliminar a necessidade de sensores LiDAR caros ou setups complexos de múltiplas câmeras, ele abre caminho para uma percepção 3D de baixo custo e alto desempenho em robótica, veículos autônomos e realidade aumentada. Não se trata apenas de criar “nuvens de pontos” bonitas; trata-se de dar às máquinas uma compreensão contínua e em tempo real do mundo físico. Como um “modelo fundacional 3D”, ele faz parte de uma tendência maior de construir IAs que não apenas processam texto ou imagens, mas que percebem, navegam e interagem com ambientes complexos e não estruturados — a pedra angular para o futuro da IA incorporada.
