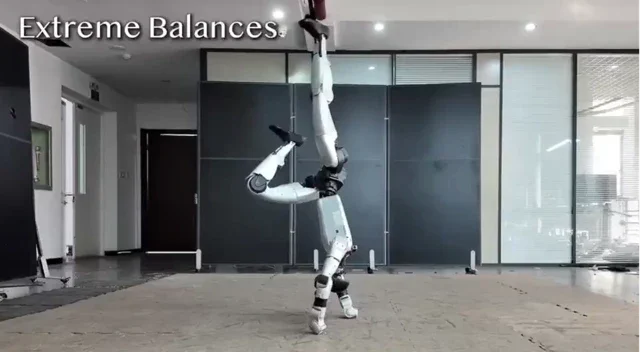
Em uma guinada revigorante em relação às rotinas perfeitamente coreografadas, mas extremamente rígidas, pesquisadores acabam de apresentar o OmniXtreme. Trata-se de uma política de IA geral que permite a um robô humanoide realizar mortais consecutivos, equilibrar-se em posições precárias e até arriscar uns passos de breakdance. Essa nova capacidade, demonstrada em um robô Unitree Robotics G1, vai muito além daquelas demonstrações “viciadas” (o famoso overfitting) que costumamos ver em vídeos promocionais — como a performance impressionante, porém de propósito único, do WuBOT na Gala do Festival da Primavera de 2026. Aqui, o papo é outro: estamos falando de um atletismo verdadeiramente versátil.
O projeto, que durou um ano e contou com a colaboração da própria Unitree, não saiu barato. A equipe de pesquisa admitiu, sem rodeios, ter “moído” dezenas de robôs G1 para conseguir decifrar o código do movimento dinâmico geral. Considerando que o preço de entrada do G1 gira em torno de US$ 13.500, foi um sacrifício considerável de hardware oferecido aos deuses do reinforcement learning (aprendizado por reforço). O objetivo era claro: superar a barreira que separa os modelos treinados para seguir um movimento específico daqueles capazes de lidar com a física caótica de manobras extremas no mundo real.
O “pulo do gato” está em um método de treinamento de dois estágios. Primeiro, uma política de controle generativo baseada em fluxo (flow-based) é pré-treinada, dando ao robô uma noção básica de movimento. Depois, ele passa por um pós-treinamento usando “RL residual consciente da atuação” (actuation-aware residual RL), um passo crítico que ajusta o modelo para levar em conta a dinâmica complexa e as limitações físicas de um robô real. Os pesquisadores afirmam que essa segunda etapa foi a chave para cruzar com sucesso a ponte entre a simulação e a realidade. E, em um gesto que fortalece toda a comunidade de robótica, os checkpoints do modelo foram liberados no GitHub.
Por que isso é importante?
O desenvolvimento de uma política única e unificada para uma gama tão vasta de movimentos de alto impacto é um marco e tanto. Isso sinaliza uma mudança de paradigma: estamos deixando de criar “especialistas” robóticos que só sabem fazer um truque espetacular para desenvolver “generalistas” com um repertório físico invejável. Ao superar o notório abismo entre simulação e realidade (sim-to-real gap) para dinâmicas extremas, o OmniXtreme oferece um roteiro viável para a criação de robôs humanoides mais robustos, adaptáveis e fisicamente competentes. A abertura do código deve acelerar a pesquisa para criar os ginastas e dançarinos robóticos multitalentosos do futuro.












