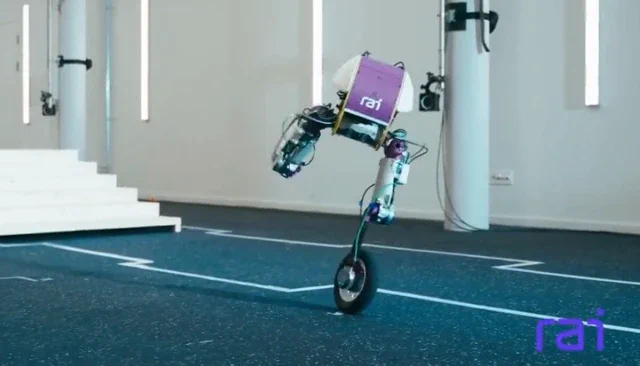
Se você achava que os robôs bípedes finalmente tinham aprendido a caminhar com naturalidade, o Robotics & AI Institute (RAI Institute) acaba de provar que, às vezes, o segredo é simplesmente “deixar rolar”. O instituto de pesquisa, capitaneado por Marc Raibert — o lendário fundador da Boston Dynamics —, revelou seu novo protótipo batizado de Roadrunner. Com apenas 15 kg, este pequeno peso-pena bípede aposentou os pés convencionais em favor de um par de rodas, criando uma máquina híbrida capaz de transições impressionantes.
O Roadrunner é um verdadeiro canivete suíço da locomoção: ele consegue alternar entre dirigir com as rodas lado a lado, deslizar em uma configuração ágil “em linha” (como um patins) e até executar pequenos passos para superar obstáculos que travariam rodas comuns. Suas pernas simétricas, que podem se articular nos joelhos tanto para frente quanto para trás, garantem uma flexibilidade de movimentos raramente vista.
Mas o “pulo do gato” não está apenas no hardware reluzente, mas sim no seu cérebro digital. O RAI Institute afirma que uma única política de controle foi treinada para gerenciar toda a complexidade motora do Roadrunner. Isso permitiu que comportamentos sofisticados — como levantar-se do chão ou equilibrar-se precariamente em uma única roda — fossem implementados via “zero-shot”. Na prática, isso significa que o robô funcionou perfeitamente na primeira tentativa no mundo real, sem a necessidade de ajustes finos exaustivos no hardware.

O conceito de transferência “zero-shot” da simulação para a realidade é um dos marcos mais cobiçados da robótica moderna. Ele reduz drasticamente o tempo e o custo de desenvolvimento, eliminando aquele abismo técnico que geralmente separa o que funciona no computador do que funciona no chão de fábrica. Ao treinar um modelo robusto o suficiente em ambiente virtual, o RAI Institute permitiu que o Roadrunner compreendesse sua própria dinâmica e aplicasse suas habilidades instantaneamente no mundo físico.
Por que isso é um divisor de águas?
Híbridos de pernas e rodas não são exatamente uma novidade — o Handle, da própria Boston Dynamics, já explorava esse conceito anos atrás. No entanto, o design ultraleve do Roadrunner e seu sistema de controle de IA unificado apontam para um futuro muito mais prático e economicamente viável. Ao combinar a eficiência energética das rodas em superfícies planas com a capacidade de transpor obstáculos das pernas, esses robôs encontram o “ponto doce” para atuar em logística e ambientes de armazém.
Enquanto os robôs totalmente humanoides continuam tentando dominar a arte de andar, correr e dar mortais, o Roadrunner sugere um caminho evolutivo diferente: um onde a agilidade e a eficiência operacional têm prioridade sobre a imitação da forma humana. Dominar múltiplas formas de locomoção com um único modelo de IA não é apenas um truque de salão impressionante; é um avanço fundamental que pode tornar os robôs versáteis muito mais simples de desenvolver e, finalmente, prontos para o trabalho pesado no mundo real.












