9 kwietnia 2026 roku amerykański Urząd Patentowy i Znaków Towarowych (USPTO) opublikował wniosek Tesla, Inc., na który – w zalewie newsów o wielkich modelach językowych – mało kto czekał. Patent US20260097493A1 liczy dwadzieścia stron, wskazuje starszego inżyniera mechanika Roda Jafariego jako jedynego wynalazcę i opisuje… kolano. Nie znajdziecie tu sieci neuronowych, modeli świata ani obietnic o autonomicznej jeździe. Zamiast tego mamy dwa łączniki, jeden siłownik liniowy i cztery punkty obrotu, ułożone tak, by humanoidalny robot mógł kroczyć przed siebie bez rujnowania firmowego budżetu.
Wniosek złożono 30 września 2022 roku – dokładnie w dniu, w którym Tesla zorganizowała swoje drugie AI Day i zaprezentowała prototyp “Bumble-C”. Tamtego wieczoru jeden z inżynierów opisał kolano robota jako „czteroprzegubowy mechanizm” (four-bar link joint) inspirowany ludzką biologią. Trzy i pół roku później biurokracja patentowa w końcu dogoniła rzeczywistość. Z dużym prawdopodobieństwem jest to mechanizm napędzający Optimusa 3, o którym Elon Musk wspominał w marcu 2026 roku na platformie X, twierdząc, że maszyna już sprawnie “spaceruje”. Jednak najciekawszym elementem patentu nie jest sam finalny projekt, lecz schemat, który pokazuje drogę do jego powstania.
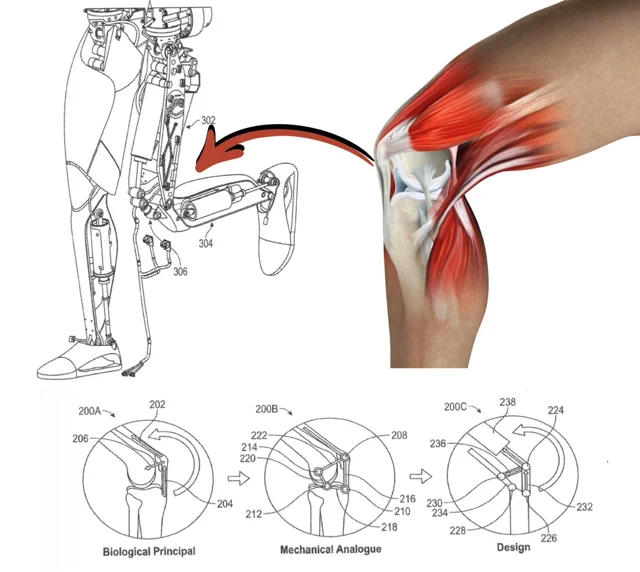
Rysunek nr 2 w patencie to swoista geneza projektu w trzech aktach: od „zasady biologicznej” (ludzkie kolano), przez „analog mechaniczny” (abstrakcyjny układ połączeń), aż po finalny „projekt”. Rzadko zdarza się, by dokumentacja patentowa tak łopatologicznie wykładała proces myślowy twórców. Ten rysunek mówi wprost: „zbudowaliśmy to tak, a nie inaczej, bo skopiowaliśmy rozwiązanie, które natura dopracowywała przez miliony lat”. Mechanizm, będący zmodyfikowanym odwróconym układem Hoeckena, imituje ludzkie kolano, pozwalając uzyskać ogromny, 150-stopniowy zakres ruchu przy użyciu jednego, niewielkiego siłownika.

Biologiczne kolano to majstersztyk efektywności. Rzepka (patella) działa jak ruchomy bloczek, zmieniając ramię dźwigni mięśnia czworogłowego tak, by dostarczyć maksymalny moment obrotowy dokładnie wtedy, gdy jest on najbardziej potrzebny podczas kroku. Co więcej, staw nie obraca się wokół jednego, stałego punktu – środek obrotu przesuwa się w trakcie ruchu. To geometryczna sztuczka, za którą odpowiadają więzadła krzyżowe, pełniące funkcję mechanicznego czworoboku przegubowego. Patent Tesli zapożycza obie te cechy – ruchome ramię dźwigni i zmienny punkt obrotu – tworząc staw, który jest brutalnie skuteczny. Dokumentacja zauważa, że zaledwie 60-stopniowy obrót siłownika przekłada się na potężny wymach dolnej części nogi.

Dlaczego to ma znaczenie?
To nie jest tylko popis inżynieryjnej błyskotliwości – to klucz do masowej produkcji humanoidów. Cała filozofia projektowa zawarta w patencie kręci się wokół cięcia kosztów. Pojedynczy siłownik liniowy jest tańszy, lżejszy i prostszy w serwisowaniu niż skomplikowane układy wielosilnikowe. Wysoka sprawność energetyczna oznacza, że robot może mieć mniejszy i lżejszy akumulator, co jeszcze bardziej obniża masę i cenę końcową. Kiedy Twoim celem jest sprzedaż Optimusa w cenie od 20 000 do 30 000 dolarów, każdy gram i każdy dolar zaoszczędzony na jednym stawie mnoży się przez miliony egzemplarzy.
To właśnie ten rodzaj twardej, pragmatycznej inżynierii sprawia, że plan Tesli, by zastąpić linie produkcyjne Modelu S i Modelu X w fabryce we Fremont liniami montażowymi Optimusa, wydaje się nieco mniej szalony. Sam projekt nie jest przy tym całkowicie odosobniony – analitycy zauważyli, że zaprezentowany pod koniec 2025 roku humanoid IRON nowej generacji od chińskiego Xpeng wykorzystuje uderzająco podobny układ Hoeckena w kolanie. Jednak biorąc pod uwagę, że Tesla chwaliła się tym rozwiązaniem już w 2022 roku, mamy tu raczej do czynienia z ewolucją zbieżną w stronę optymalnego rozwiązania niż ze zwykłym kopiowaniem.
Ewolucja miała miliony lat na dopracowanie geometrii ruchu. Tesla musi zrobić to samo w kilka lat i przy ograniczonym budżecie. Ten patent to rzadki wgląd w to, jak zamierzają dopiąć swego.