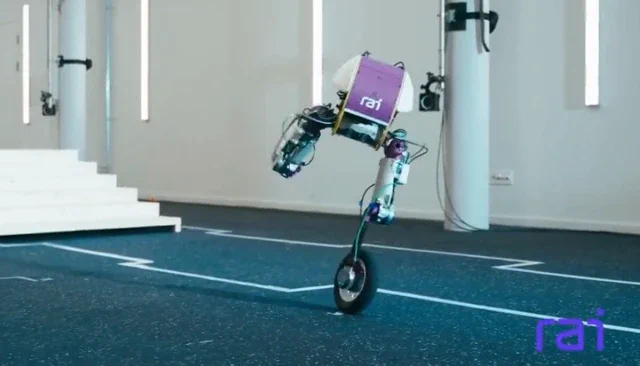
Jeśli myśleliście, że dwunożne roboty w końcu opanowały trudną sztukę chodzenia, Robotics & AI Institute (RAI Institute) właśnie udowadnia, że czasem lepiej po prostu… pojechać po całości. Instytut badawczy, którym kieruje legendarny założyciel Boston Dynamics, Marc Raibert, zaprezentował prototyp o nazwie Roadrunner. To ważący zaledwie 15 kg dwunóg, który zamiast klasycznych stóp posiada parę kół. Maszyna ta stanowi fascynującą hybrydę różnych sposobów poruszania się: potrafi jeździć z kołami ustawionymi obok siebie, śmigać w konfiguracji liniowej niczym profesjonalny rolkarz, a gdy zajdzie taka potrzeba – pokonywać przeszkody, wykonując zwinne kroki.
Symetryczne nogi robota, które dzięki ruchomym stawom kolanowym mogą zginać się zarówno do przodu, jak i do tyłu, zapewniają mu niespotykaną elastyczność postawy. Jednak prawdziwa magia kryje się nie w samym hardware, lecz w „mózgu” maszyny. RAI Institute podkreśla, że za wszystkie skomplikowane manewry Roadrunnera odpowiada jedna, uniwersalna polityka sterowania (control policy). Pozwoliło to na wdrożenie szeregu imponujących zachowań – takich jak wstawanie z ziemi czy balansowanie na jednym kole – w trybie „zero-shot”. W świecie robotyki oznacza to, że algorytm zadziałał bezbłędnie w rzeczywistości już za pierwszym razem, bez potrzeby żmudnego dostrajania parametrów bezpośrednio na fizycznym robocie.

Koncepcja transferu „zero-shot” z symulacji do rzeczywistości to kamień milowy w rozwoju tej dziedziny. Drastycznie skraca ona czas i obniża koszty szkolenia maszyn, które tradycyjnie wymagały mozolnego „zasypywania przepaści” między światem wirtualnym a fizycznym. Dzięki wytrenowaniu wystarczająco odpornego modelu w symulacji, RAI Institute sprawił, że Roadrunner błyskawicznie zrozumiał własną dynamikę i od razu zaczął wykorzystywać nabyte umiejętności w realnym świecie.
Dlaczego to takie ważne?
Hybrydy łączące nogi z kołami nie są nowym pomysłem – wystarczy wspomnieć słynnego robota Handle od Boston Dynamics, który lata temu przecierał te szlaki. Jednak Roadrunner, ze swoją piórkową wagą i zaawansowanym, ujednoliconym systemem sterowania AI, wskazuje na znacznie bardziej praktyczną i opłacalną przyszłość takich konstrukcji. Łącząc energooszczędność kół na płaskich powierzchniach z mobilnością nóg w trudniejszym terenie, roboty te idealnie wpisują się w potrzeby logistyki i środowisk magazynowych.
Podczas gdy pełnowymiarowe humanoidy wciąż szlifują sztukę biegania i robienia salt, Roadrunner sugeruje inną ścieżkę ewolucji: taką, w której zwinność i efektywność są ważniejsze niż wierne kopiowanie ludzkiej sylwetki. Umiejętność opanowania wielu form lokomocji za pomocą jednego modelu AI to nie tylko efektowna sztuczka inżynieryjna – to fundamentalny postęp, który może sprawić, że wszechstronne roboty staną się znacznie prostsze w budowie i codziennym użytkowaniu.












