Dodanie trzeciego robota do floty nie powinno kłaść całego systemu na łopatki, a jednak dla blisko 90% zespołów zajmujących się robotyką to brutalna rzeczywistość. Złożoność koordynacji wielu maszyn, oparta na scentralizowanych kontrolerach i łączach o ogromnej przepustowości, od lat stanowiła wąskie gardło branży. Jednak naukowcy z Oregon State University właśnie opublikowali manifest przyszłości, w której roje robotów współpracują ze sobą z niemal biologiczną, instynktowną precyzją, przypominającą inteligencję kolonii mrówek.
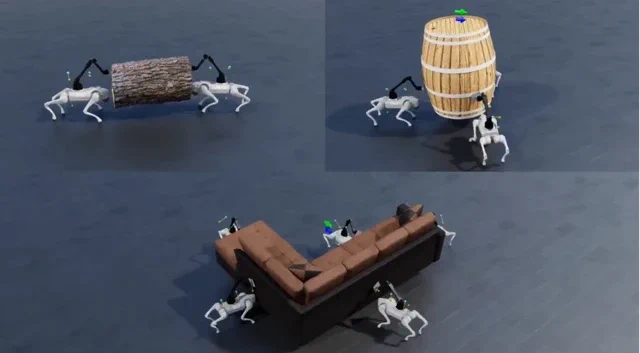
Ich najnowsza praca, decPLM (Decentralized Pinch-Lift-Move), została przyjęta na konferencję IEEE International Conference on Robotics and Automation (ICRA) 2026 – co w świecie robotyki jest odpowiednikiem występu jako headliner na głównej scenie Coachella. System pozwala grupie czworonożnych robotów wyposażonych w ramiona na wspólną pracę przy podnoszeniu i przenoszeniu ciężkich, niewygodnych przedmiotów, takich jak kłody, beczki, a nawet kanapy. Co w tym przełomowego? Roboty robią to bez ani jednego bitu przesłanego między sobą. Żadnego węzła nadrzędnego, żadnego Wi-Fi, żadnej gorączkowej wymiany komend na poziomie stawów. Zamiast tego, koordynacja wynika wyłącznie z tego, że roboty czują siły wywierane na niesiony obiekt, polegając jedynie na własnych czujnikach wewnętrznych – koncepcja ta znana jest jako propriocepcja.
Magia dzieje się pod maską, dzięki wspólnej polityce (policy) wytrenowanej za pomocą sprytnego systemu nagród “Constellation Reward”. Motywuje on roboty do działania tak, jakby były sztywno przytwierdzone do ładunku. To zdecentralizowane podejście jest szokująco skuteczne i skalowalne. System został wytrenowany w symulacji z udziałem zaledwie dwóch robotów, ale bez żadnego dodatkowego treningu radzi sobie z grupami liczącymi nawet dziesięć jednostek. Pozwala to uniknąć sieciowych koszmarów, które dręczą systemy wielorobotyczne, gdzie dodanie kolejnego agenta zazwyczaj kończy się paraliżującymi opóźnieniami i wykładniczym wzrostem złożoności.
Dlaczego to ma znaczenie?
Badania te wywracają do góry nogami powszechne założenie, że więcej robotów to więcej problemów. W przypadku decPLM większa liczba maszyn oznacza w rzeczywistości mniejszy błąd. Zespół odkrył, że gdy flota skalowała się z dwóch do dziesięciu robotów, błąd śledzenia ładunku spadł o oszałamiające 80%. Nadmiarowość większego zespołu naturalnie niweluje indywidualne potknięcia, co prowadzi do płynniejszej i bardziej precyzyjnej operacji.
Odcinając robotom “komunikacyjną kroplówkę”, Oregon State stworzyło system, który jest z natury bardziej wytrzymały, skalowalny i elastyczny. To drogowskaz ku przyszłości, w której wdrożenie roju robotów logistycznych będzie tak proste, jak dodanie kolejnej jednostki do grupy, bez konieczności przebudowywania całej architektury sieciowej. Jak bez ogródek podsumowują autorzy: te prace potwierdzają, że “wąskim gardłem w robotyce nie są już możliwości sprzętowe – jest nim infrastruktura uczenia maszynowego”.