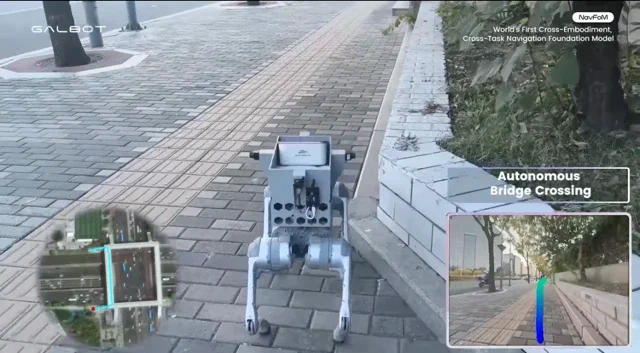
Badacze z Shanghai Jiao Tong University oraz SenseTime Research właśnie pochwalili się materiałem wideo prezentującym NavFm – jak sami twierdzą, „pierwszy na świecie model bazowy do nawigacji, który jest niezależny od formy robota i rodzaju zadania” (cross-embodiment, cross-task). Mówiąc po ludzku: budują uniwersalny mózg nawigacyjny, który w teorii można „wczepić” do dowolnej maszyny, by ta bezbłędnie trafiała z punktu A do punktu B, nie taranując po drodze wszystkiego, co napotka. Na nagraniu widzimy robotycznego psa, który radzi sobie na miejskim torze przeszkód z zacięciem godnym pozazdroszczenia.

Czworonóg zręcznie omija przechodniów, uparcie podąża za wyznaczonym człowiekiem mimo wizualnych rozpraszaczy i samodzielnie realizuje wieloetapowe zadanie kurierskie. Po otrzymaniu zlecenia robot autonomicznie wyznacza trasę przez mosty, chodniki, a nawet pokonuje schody, by dotrzeć do celu. Całość robi spore wrażenie, pokazując poziom świadomości otoczenia i planowania trasy, który wykracza daleko poza proste zdalne sterowanie czy sztywne, zaprogramowane ścieżki. Oczywiście, nawigowanie po sterylnych chodnikach w kontrolowanym demo to jedno, a starcie z chaotyczną, miejską dżunglą to zupełnie inna bajka – o czym boleśnie przekonało się już wielu producentów autonomicznych pojazdów dostawczych. Chińskie robo-furgonetki nie boją się betonu ani motocykli
Dlaczego to takie ważne?
Kluczowe są tu pojęcia „model bazowy” (foundation model) oraz „cross-embodiment”. Zamiast mozolnie programować logikę poruszania się dla każdego robota z osobna, model bazowy dostarcza uogólnioną inteligencję, którą można błyskawicznie zaadaptować. Wyobraźcie sobie różnicę między projektowaniem unikalnego silnika dla każdego modelu samochodu a stworzeniem uniwersalnego systemu GPS, który zadziała w każdym pojeździe, do którego go włożymy. Jeśli obietnice twórców NavFm się potwierdzą, ten sam model, który prowadzi mechanicznego psa, mógłby z minimalnym tuningiem sterować kołowym dronem czy robotem humanoidalnym. To mogłoby drastycznie skrócić czas prac rozwojowych i stać się kamieniem milowym w budowie prawdziwie wszechstronnych maszyn, zdolnych do błyskawicznej adaptacji do nowego ciała i nieznanego środowiska.












