Jeśli kiedykolwiek próbowałeś zbudować robotyczną dłoń, wiesz, że to prawdziwa inżynierska gehenna. Odtworzenie delikatnego, adaptacyjnego chwytu ludzkiej dłoni to jeden ze świętych Graali robotyki. Głównym wyzwaniem nie jest jedynie dodawanie kolejnych stawów; to stworzenie systemu, który może dopasować się do nieregularnych kształtów obiektów bez potrzeby ciężkiego, prądożernego silnika dla każdego pojedynczego punktu artykulacji. Większość projektów jest zbyt sztywna, zbyt skomplikowana lub zbyt delikatna na realia prawdziwego świata.
Na scenę wkracza Tesla. Niedawno opublikowany wniosek patentowy (WO2024/073138A1) dotyczący dłoni Optimus Gen 2 uchyla rąbka tajemnicy ich filozofii projektowania, a jest to majstersztyk brutalnej efektywności. Zamiast gonitwy za złożonością, inżynierowie Tesli postawili na sprytną fizykę, solidną mechanikę i etos projektowania, który krzyczy: „stworzone do masowej produkcji, a nie tylko na pokazy!”.
Zalety niedostatecznie sterowanego systemu
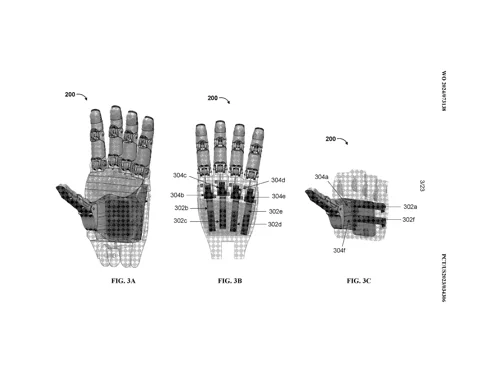
Sercem projektu Tesli jest system „underactuated” (niedostatecznie sterowany), koncepcja, w której używa się mniej silników niż całkowita liczba stawów. W przypadku dłoni Optimus, sześć siłowników napędza jedenaście stawów — dwa dla kciuka i po jednym dla każdego z czterech palców. Osiąga się to za pomocą systemu napędzanego linkami, który działa niczym biologiczne ścięgna. Pojedyncza linka biegnie przez każdy palec, a po pociągnięciu powoduje, że stawy zwijają się w naturalnym, sekwencyjnym ruchu.
To podejście rozwiązuje problem adaptacji. Ponieważ stawy nie są zmuszane do sztywnej, z góry określonej ścieżki, palce mogą pasywnie dopasować się do kształtu obiektu, niezależnie od tego, czy jest to wiertarka, czy delikatne jajko. To forma „mechanicznej inteligencji”, która zdejmuje ciężar skomplikowanych obliczeń chwytu z oprogramowania na sam sprzęt.
Ale inżynierowie Tesli dodali genialny haczyk. Sprężyny skrętne u podstawy każdego palca są celowo sztywniejsze niż te na opuszku palca. Tworzy to „pasywną inteligencję”, gdzie słabszy staw opuszka palca zgina się jako pierwszy, aby objąć obiekt, a następnie mocniejszy staw podstawowy. Gwarantuje to automatyczny, pewny „chwyt klatkujący”, bez konieczności, by centralny procesor robota nadmiernie się głowił.
Przekładnie ślimakowe: Utrzymywanie ciężkich ładunków za darmo
Być może najbardziej genialny element inżynieryjny ukryty w patencie to zastosowanie przekładni ślimakowej i koła ślimakowego dla siłowników. Nie chodzi tu tylko o przekształcenie obrotu silnika w pociągnięcie linki; to inżynieryjne obejście praw fizyki z ogromnymi konsekwencjami dla efektywności.
Przekładnie ślimakowe są zazwyczaj „nierozprzęgalne” (non-backdrivable). Ze względu na wysokie tarcie i stromy kąt zębów przekładni, koło wyjściowe nie może obrócić wałka ślimakowego. Dla robota to supermoc. Gdy Optimus chwyci ciężki przedmiot, przekładnie mechanicznie blokują chwyt. Silniki mogą się wtedy całkowicie zrelaksować, utrzymując ciężar przy zerowym zużyciu energii elektrycznej. W porównaniu do dłoni z napędem bezpośrednim, które muszą nieustannie spalać energię, by walczyć z grawitacją, jest to monumentalne zwycięstwo dla żywotności baterii i zarządzania termicznego.
Ta konfiguracja zapewnia również ogromną redukcję przełożenia w jednym, kompaktowym stopniu, umożliwiając małym, szybkim silnikom generowanie miażdżącej siły chwytu, jednocześnie będąc starannie upakowanym w dłoni.
Stworzone dla prawdziwego świata: Trwałość i precyzja
Świetny projekt na papierze jest bezużyteczny, jeśli zawiedzie po tysiącu cykli. Patent ujawnia głęboką obsesję na punkcie długoterminowej niezawodności.
Jednym z największych punktów awarii w systemach napędzanych linkami jest zmęczenie i rozciąganie się linki. Tesla rozwiązuje ten problem za pomocą dwóch sprytnych rozwiązań:
- Wypukła krzywizna: Inżynieryjny trik: Zamiast pozwolić lince ostro zginać się nad stawem, gładka, wypukła powierzchnia jest formowana między ogniwami palców. Zmusza to linkę do zginania się po bezpiecznym promieniu, masywnie wydłużając jej żywotność.
- Automatyczny napinacz: Ukryty w opuszku palca jest mechanizm sprężynowy, który nieustannie naciąga koniec linki. Automatycznie usuwa to wszelkie luzy, gdy linka rozciąga się w czasie, zapewniając, że dłoń pozostaje napięta i responsywna przez lata bez ręcznej konserwacji.
W kwestii czujników, Tesla ominęła nieporęczne i podatne na awarie czujniki mechaniczne. Zamiast tego, stały magnes pierścieniowy jest zintegrowany wokół osi obrotu każdego stawu. Stacjonarny czujnik Halla mierzy zmieniające się pole magnetyczne podczas obrotu stawu, zapewniając precyzyjne, beztarciowe i bezawaryjne wykrywanie kąta. To bezkontaktowe podejście jest kluczowe dla utrzymania submilimetrowej precyzji przez miliony cykli.
Więcej niż dłoń, to filozofia
Czytając gęsty, techniczny język patentu, wyłania się jasny obraz. Tesla nie buduje laboratoryjnej ciekawostki; projektuje produkt przeznaczony do masowej produkcji i wdrożenia w nieuporządkowanym, nieprzewidywalnym świecie rzeczywistym. Każda decyzja — od nierozprzęgalnych przekładni po samonapinające się ścięgna — jest zoptymalizowana pod kątem efektywności, trwałości i możliwości produkcyjnych.
Podczas gdy inne roboty humanoidalne mogą chwalić się większą liczbą stopni swobody lub bardziej egzotycznymi siłownikami, dłoń Optimus reprezentuje pragmatyczne podejście skupione na rozwiązywaniu kluczowych problemów manipulacji robotycznej w najprostszy, najbardziej niezawodny możliwy sposób. To projekt, który rozumie, że w prawdziwym świecie niezawodność i efektywność zawsze przewyższą efektowną złożoność. I to właśnie, bardziej niż jakakolwiek pojedyncza cecha, czyni ten projekt tak fascynującym.
