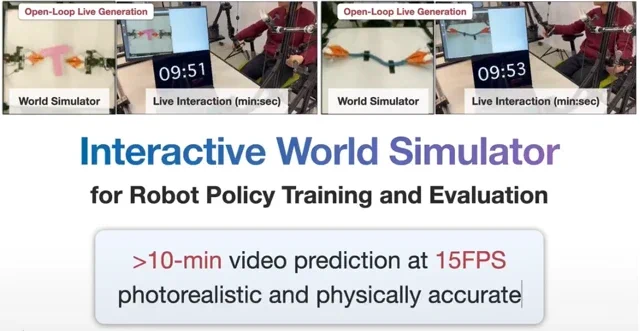
Wereldmodellen in de robotica hebben vaak de fysieke consistentie van een natte krant zodra je ze langer dan een paar seconden hun gang laat gaan. Maar er is een nieuwe speler op het veld die die status quo volledig op zijn kop zet: de Interactive World Simulator. Dit project claimt meer dan 10 minuten aan stabiele, interactieve videovoorspellingen te kunnen genereren op 15 FPS, en dat allemaal op een enkele NVIDIA, Inc. RTX 4090. Je leest het goed: tien minuten aan complexe fysica, vloeiend draaiend op hardware die je gewoon bij de computerboer om de hoek kunt halen.
Dit ‘action-conditioned’ wereldmodel, ontwikkeld door onderzoeker Yixuan Wang, is geen simpele verzameling vooraf gerenderde beelden; het is een volledig interactieve simulatie die je in real-time kunt “besturen”. Het meest indrukwekkende? Je kunt het direct zelf uitproberen via een browser-demo, zonder dat je jezelf door de gebruikelijke hel van Python-libraries of pip install-foutmeldingen hoeft te worstelen. Het model slaat zich moeiteloos door taken met veel fysiek contact, van het secuur leggen van kabels tot het bij elkaar vegen van stapels objecten—en dat alles puur gegenereerd in pixel-space. Dit zijn geen opnames van een fysieke camera, maar ‘open-loop’ voorspellingen die volledig uit het brein van het model komen.
Waarom is dit een doorbraak?
Dit is veel meer dan een leuk speeltje voor tech-enthousiastelingen; het is een mogelijke oplossing voor de twee grootste hoofdpijndossiers binnen de robotica. Ten eerste maakt het schaalbare datageneratie mogelijk. In plaats van afhankelijk te zijn van trage, peperduure robots in de echte wereld om trainingsdata te verzamelen, kunnen ontwikkelaars nu bergen aan fysiek geloofwaardige data genereren binnen de simulator.
Ten tweede maakt het een getrouwe beleidsevaluatie mogelijk. Onderzoekers kunnen het “brein” van een robot testen en finetunen in een veilige, consistente en eindeloos herhaalbare virtuele wereld, nog voordat er ook maar één schroefje van de hardware in beweging komt. In gewone mensentaal: het maakt het trainen van robots goedkoper, sneller, en de kans dat een robotarm van een paar ton per ongeluk een gat in de muur slaat, wordt hiermee een stuk kleiner.












