Een derde robot toevoegen aan je vloot zou in theorie simpel moeten zijn, maar in de praktijk is het vaak het recept voor een systeemcrash. Voor naar schatting 90% van de roboticateams is dit de harde realiteit: de complexiteit van multi-robotcoördinatie, met zijn afhankelijkheid van centrale controllers en enorme bandbreedte, is al jaren de ultieme bottleneck. Onderzoekers van Oregon State University hebben echter net een blauwdruk gepubliceerd voor een toekomst waarin robotteams samenwerken met de stille, instinctieve intelligentie van een mierenkolonie.
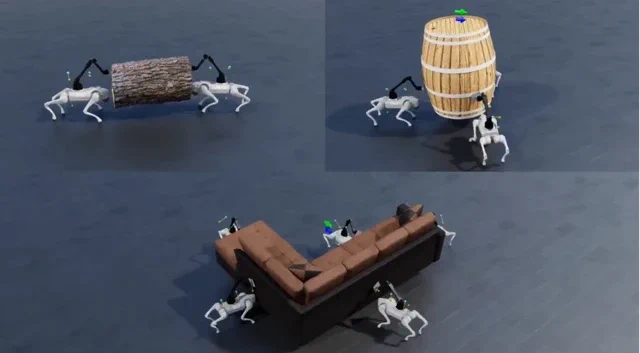
Hun nieuwe paper, decPLM (Decentralized Pinch-Lift-Move), is geaccepteerd voor de IEEE International Conference on Robotics and Automation (ICRA) 2026—in de robotica-wereld is dat vergelijkbaar met een headliner-spot op Lowlands of Coachella. Het systeem stelt een team van viervoetige robots met grijparmen in staat om gezamenlijk zware, onhandige objecten zoals boomstammen, vaten en zelfs een compleet bankstel op te tillen en te verplaatsen, zónder dat er een bit aan communicatie aan te pas komt. Geen centrale master node, geen wifi-signaal, geen paniekerige uitwisseling van commando’s op gewrichtsniveau. In plaats daarvan ontstaat de coördinatie puur doordat de robots de krachten voelen die op het object worden uitgeoefend, enkel gebruikmakend van hun eigen interne sensoren—een concept dat bekendstaat als proprioceptie.
De magie zit hem in een ‘shared policy’ die is getraind met een slim “Constellation Reward”-systeem. Dit stimuleert de robots om zich te gedragen alsof ze onwrikbaar aan de lading vastzitten. Deze gedecentraliseerde aanpak is schokkend effectief en schaalbaar. De policy werd getraind met slechts twee robots in een simulatie, maar vertaalt zich moeiteloos naar teams van wel tien robots zonder enige extra training. Hiermee worden de gebruikelijke netwerknachtmerries omzeild die multi-robotsystemen vaak teisteren, waarbij meer agenten meestal leiden tot verlammende latency en complexiteit.
Waarom is dit een game-changer?
Dit onderzoek zet een hardnekkige aanname op zijn kop: dat meer robots automatisch meer problemen betekenen. Met decPLM zorgen meer robots juist voor minder fouten. Het team ontdekte dat naarmate de vloot werd uitgebreid van twee naar tien robots, de tracking-fout van de lading met maar liefst 80% afnam. De redundantie van een groter team vlakt individuele foutjes op natuurlijke wijze uit, wat resulteert in een soepelere en nauwkeurigere operatie.
Door de kruk van constante communicatie weg te slaan, heeft Oregon State een systeem gecreëerd dat inherent robuuster, schaalbaarder en aanpasbaarder is. Het wijst de weg naar een toekomst waarin het inzetten van een zwerm logistieke robots even simpel is als het toevoegen van een extra unit aan de groep, zonder dat je de hele netwerkarchitectuur hoeft te herzien. Zoals de onderzoekers het zelf kernachtig verwoorden: dit werk bewijst dat “de bottleneck in de robotica niet langer de hardware is, maar de ML-infrastructuur.”