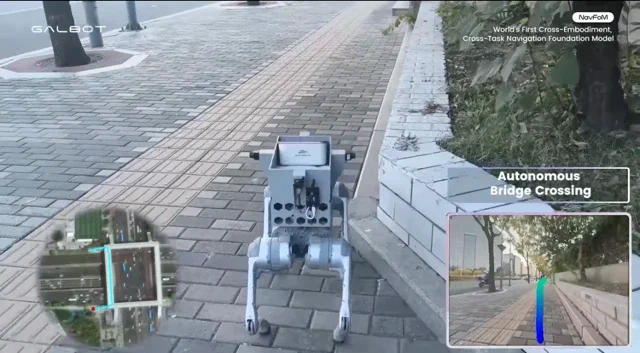
Onderzoekers van de Shanghai Jiao Tong University en SenseTime Research hebben zojuist een video gedropt van wat zij NavFm noemen: ’s werelds eerste “cross-embodiment, cross-task navigation foundation model.” In gewone mensentaal: ze bouwen aan een universeel navigatiebrein dat je in theorie in elke willekeurige robot kunt pluggen om hem zonder kleerscheuren van A naar B te loodsen. In de demonstratievideo zien we een generieke robothond die de kunst van de stedelijke hindernisbaan schijnbaar moeiteloos onder de knie heeft.

De viervoeter ontwijkt behendig voetgangers, blijft strak gefocust op een menselijk doelwit ondanks visuele afleidingen, en voert zelfs eigenhandig een complexe bezorgtaak uit. Na het ontvangen van de missie stippelt de robot autonoom een route uit over bruggen en trottoirs, en beklimt hij trappen om zijn bestemming te bereiken. Het is indrukwekkend om te zien; het niveau van omgevingsbewustzijn en taakgerichte routeplanning ligt mijlenver boven simpele afstandsbediening of voorgeprogrammeerde paden. Natuurlijk is navigeren over strakke stoepen in een gelikte demo-video één ding; de chaotische realiteit van het dagelijks leven in de stad is een heel ander verhaal — een les die sommige autonome bezorgrobots momenteel op de harde manier leren. China's Robo-Vans Trotseren Beton en Motoren
Waarom is dit een big deal?
De crux zit hem in de termen “foundation model” en “cross-embodiment.” In plaats van voor elke nieuwe robot minutieus de navigatielogica te programmeren, biedt een foundation model een gegeneraliseerde intelligentie die aanpasbaar is. Zie het als het verschil tussen het bouwen van een unieke motor voor elk specifiek automodel, versus het uitvinden van een universele GPS die werkt in elk voertuig waar je hem in zet.
Als de claims rondom NavFm standhouden, zou hetzelfde kernmodel dat deze robothond aanstuurt, met minimale fine-tuning ook een rijdende drone of een humanoïde kunnen besturen. Dit zou de ontwikkeltijd drastisch verkorten en een cruciale stap kunnen zijn naar robots die echt breed inzetbaar zijn en zich ter plekke kunnen aanpassen aan nieuwe lichamen en omgevingen.












