Als je ooit hebt geprobeerd een robotische hand te bouwen, weet je dat het een technische nachtmerrie is. Het repliceren van de delicate, adaptieve grip van een menselijke hand is een van de eindbazen van de robotica. De grootste uitdaging is niet alleen het toevoegen van meer gewrichten; het is het creëren van een systeem dat zich kan aanpassen aan onregelmatig gevormde objecten zonder een zware, energievretende motor nodig te hebben voor elk afzonderlijk articulatiepunt. De meeste ontwerpen zijn te stug, te complex of te fragiel voor de echte wereld.
En toen kwam Tesla om de hoek kijken. Een recent gepubliceerde patentaanvraag (WO2024/073138A1) voor de Optimus Gen 2-hand licht een tipje van de sluier op van hun ontwerpfilosofie, en het is een masterclass in brute efficiëntie. In plaats van complexiteit na te jagen, hebben Tesla’s ingenieurs ingezet op slimme fysica, robuuste mechanica en een ontwerpethos dat uitschreeuwt: “gebouwd voor productie, niet alleen voor demo’s.”
Het Underactuated Voordeel
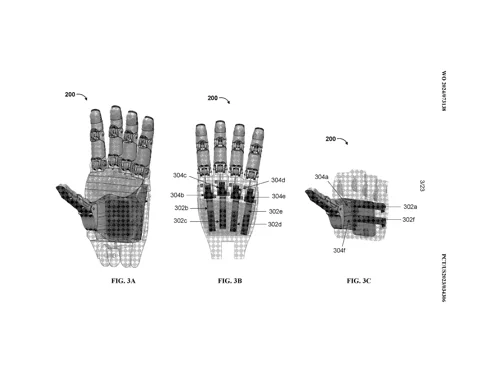
De kern van Tesla’s ontwerp is een “underactuated” systeem, een concept waarbij minder motoren worden gebruikt dan het totale aantal gewrichten. Voor de Optimus-hand drijven zes actuatoren elf gewrichten aan – twee voor de duim en één voor elk van de vier vingers. Dit wordt bereikt met een kabelgestuurd systeem dat fungeert als een biologische pees. Een enkele kabel loopt door elke vinger, en wanneer deze wordt aangetrokken, buigen de gewrichten in een natuurlijke, opeenvolgende beweging.
Deze aanpak lost het aanpasbaarheidsprobleem op. Omdat de gewrichten niet in een stijf, vooraf bepaald pad worden gedwongen, kunnen de vingers zich passief aanpassen aan de vorm van een object, of het nu een boormachine is of een delicaat ei. Het is een vorm van “mechanische intelligentie” die complexe grijpberekeningen van de software naar de hardware zelf verplaatst.
Maar de ingenieurs van Tesla voegden er een cruciale wending aan toe. De torsieveren bij het basisgewricht van elke vinger zijn opzettelijk stijver dan die aan de vingertop. Dit creëert een “passieve intelligentie” waarbij het zwakkere vingertopgewricht eerst buigt om zich om een object te wikkelen, gevolgd door het sterkere basisgewricht. Dit garandeert automatisch een veilige, “vangende” grip, zonder dat de centrale processor van de robot erover hoeft na te denken.
Wormwielaandrijvingen: Zware Lasten Gratis Vasthouden
Misschien wel het meest briljante stukje engineering dat verborgen zit in het patent, is het gebruik van een wormwiel- en wormwieloverbrenging voor de actuatoren. Dit gaat niet alleen over het omzetten van de rotatie van een motor in een kabeltrek; het is een fysica-hack met enorme implicaties voor efficiëntie.
Wormwielaandrijvingen zijn doorgaans “niet-terugdraaibaar” of zelfremmend. Door de hoge wrijving en de steile hoek van de tandwieltanden kan het uitgaande wiel het ingaande wormwiel niet aandrijven. Voor een robot is dit een superkracht. Zodra Optimus een zwaar object vastgrijpt, vergrendelen de tandwielen de grip mechanisch. De motoren kunnen dan volledig ontspannen, waarbij ze het gewicht vasthouden met nul elektrisch energieverbruik. Vergeleken met direct-drive handen die constant energie moeten verbranden om de zwaartekracht te bestrijden, is dit een monumentale overwinning voor de batterijduur en het thermisch beheer.
Deze opstelling zorgt ook voor een enorme tandwielreductie in één enkele, compacte fase, waardoor kleine, snelle motoren een botverpulverende grijpkracht kunnen genereren, terwijl ze netjes in de handpalm zijn verpakt.
Gebouwd voor de Echte Wereld: Duurzaamheid en Precisie
Een geweldig ontwerp op papier is waardeloos als het na duizend cycli de geest geeft. Het patent onthult een diepe obsessie met langetermijnbetrouwbaarheid.
Een van de grootste storingspunten in kabelgestuurde systemen is kabelvermoeidheid en -rekking. Tesla pakt dit aan met twee slimme oplossingen:
- De Bolle Bocht-Hack: In plaats van de kabel scherp over een gewricht te laten buigen, is er een glad, bol gebogen oppervlak gevormd tussen de vingerverbindingen. Dit dwingt de kabel om over een veilige straal te buigen, waardoor de levensduur enorm wordt verlengd.
- De Automatische Spanner: Verborgen in de vingertop zit een veerbelast mechanisme dat constant aan het uiteinde van de kabel trekt. Dit vangt automatisch elke speling op naarmate de kabel na verloop van tijd uitrekt, zodat de hand jarenlang strak en responsief blijft zonder handmatig onderhoud.
Voor detectie omzeilde Tesla omvangrijke en storingsgevoelige mechanische sensoren. In plaats daarvan is een permanente ringmagneet geïntegreerd rond elke gewrichtsas. Een stationaire Hall-effectsensor meet het veranderende magnetische veld terwijl het gewricht roteert, wat zorgt voor precieze, wrijvingsloze en slijtagevrije hoekdetectie. Deze contactloze benadering is cruciaal voor het handhaven van submillimeter nauwkeurigheid over miljoenen cycli.
Meer dan een Hand, Het is een Filosofie
Bij het lezen van de dichte, technische taal van het patent ontstaat een duidelijk beeld. Tesla bouwt geen laboratoriumcuriositeit; het ontwerpt een product dat bedoeld is voor massaproductie en inzet in de rommelige, onvoorspelbare echte wereld. Elke beslissing – van de zelfremmende tandwielen tot de automatisch spannende pezen – is geoptimaliseerd voor efficiëntie, duurzaamheid en produceerbaarheid.
Hoewel andere humanoïde robots misschien opscheppen met meer vrijheidsgraden of exotischere actuatoren, vertegenwoordigt de Optimus-hand een pragmatische benadering gericht op het oplossen van de kernproblemen van robotische manipulatie op de eenvoudigste, meest robuuste manier mogelijk. Het is een ontwerp dat begrijpt dat in de echte wereld betrouwbaarheid en efficiëntie altijd de overhand zullen hebben op flitsende complexiteit. En dat, meer dan welke afzonderlijke functie dan ook, is wat dit ontwerp zo aantrekkelijk maakt.
