Il 9 aprile 2026, l’ufficio brevetti statunitense (USPTO) ha reso pubblico un documento di Tesla, Inc. che quasi nessuno si aspettava. Il brevetto US20260097493A1 si sviluppa lungo venti pagine, indica il Senior Mechanical Engineer Rod Jafari come unico inventore e descrive, molto semplicemente, un ginocchio. Niente reti neurali, niente “world models”, nessuna roboante promessa sulla guida autonoma. Solo due bracci di collegamento, un attuatore lineare e quattro perni disposti in modo chirurgico per permettere a un umanoide di camminare senza mandare in rosso il bilancio aziendale.
La domanda era stata depositata il 30 settembre 2022, lo stesso giorno in cui Tesla celebrava il suo secondo AI Day mostrando il prototipo “Bumble-C”. Quella sera, un ingegnere descrisse l’articolazione del robot come un “four-bar link joint” (un quadrilatero articolato) ispirato alla biologia umana. Tre anni e mezzo dopo, i registri dei brevetti hanno finalmente confermato quei dettagli. Con ogni probabilità, questo è il ginocchio che muove l’attuale “Optimus 3”, che il CEO Elon Musk ha confermato essere già operativo in un post su X di fine marzo 2026. L’aspetto più affascinante del brevetto non è però il design finale, ma lo schema che illustra il percorso logico per arrivarci.
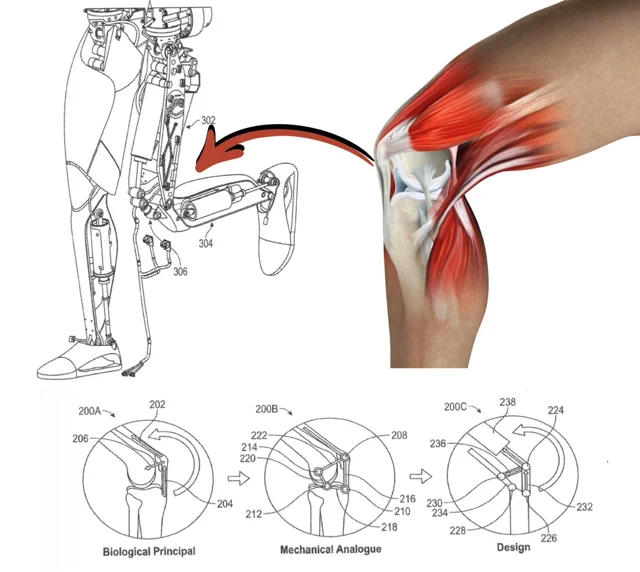
La “FIG. 2” del brevetto è una sorta di storia delle origini in tre pannelli: si parte dal “Principio Biologico” (un ginocchio umano), si passa per l’ “Analogo Meccanico” (un sistema di leve astratto) e si arriva al “Design” definitivo. È raro che un brevetto metta a nudo il proprio ragionamento in modo così palese. Il disegno dice chiaramente: la forma di questo componente è dettata dal fatto che abbiamo copiato qualcosa che in natura funziona già in modo eccelso. Il meccanismo, una variante del sistema di Hoecken inverso, imita il ginocchio umano per ottenere un raggio di movimento impressionante di circa 150° utilizzando un singolo, piccolo attuatore.

Il ginocchio biologico è un capolavoro di efficienza. La rotula (patella) agisce come una puleggia mobile, modificando la leva del muscolo quadricipite per scaricare la massima coppia esattamente quando è più necessaria durante la camminata. Inoltre, l’articolazione non ruota su un unico punto fisso; il suo centro di rotazione si sposta, un trucco geometrico gestito dai legamenti crociati che funzionano, meccanicamente, proprio come un quadrilatero articolato. Il brevetto di Tesla prende in prestito queste due proprietà — un braccio di leva mobile e un perno non fisso — per creare un’articolazione brutalmente efficiente. Il documento sottolinea come una rotazione di soli 60 gradi dell’attuatore si traduca in un arco di movimento vastissimo per la parte inferiore della gamba.

Perché questo dettaglio è fondamentale?
Non siamo di fronte a un semplice esercizio di stile ingegneristico; questa è la chiave per la produzione di massa degli umanoidi. L’intera filosofia progettuale descritta nel brevetto punta alla riduzione dei costi. Un singolo attuatore lineare è più economico, leggero e semplice di un’articolazione multimotore. La sua efficienza energetica permette di utilizzare batterie più piccole e leggere, riducendo ulteriormente la massa totale e il costo del robot. Quando l’obiettivo dichiarato è vendere Optimus a una cifra compresa tra i 20.000 € e i 30.000 €, ogni grammo e ogni euro risparmiato su un singolo giunto si moltiplica per milioni di unità prodotte.
È questo tipo di ingegneria pragmatica a rendere meno folle il piano di Tesla di sostituire le linee di produzione di Model S e Model X nella fabbrica di Fremont con una linea dedicata a Optimus. Il design in sé non è un’esclusiva assoluta: alcuni analisti hanno notato che l’umanoide IRON di nuova generazione di Xpeng, svelato a fine 2025, utilizza un sistema di Hoecken invertito sorprendentemente simile. Tuttavia, considerando che il design di Tesla era già pubblico (seppur non brevettato nei dettagli) dall’AI Day del 2022, sembra più un caso di evoluzione convergente verso la soluzione ottimale che una vera e propria imitazione.
L’evoluzione ha impiegato milioni di anni per perfezionare questa geometria. Tesla deve arrivarci con un budget prefissato e, soprattutto, in fretta. Questo brevetto è la prova tangibile di come intendano riuscirci.