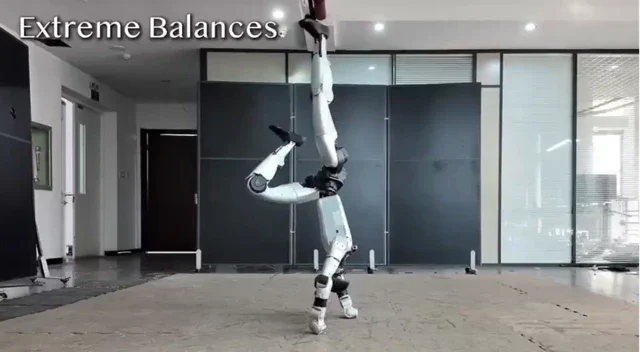
In una netta rottura con le solite routine perfettamente coreografate ma decisamente rigide, un team di ricercatori ha dato vita a OmniXtreme: una policy di IA generalista che permette a un robot umanoide di inanellare backflip, restare in equilibrio in posizioni precarie e persino lanciarsi nella breakdance. Questa nuova frontiera, testata sul modello G1 di Unitree Robotics, va ben oltre le policy “overfitted” che siamo abituati a vedere nei demo più appariscenti — come l’impressionante ma monotematica performance di WuBOT al Gala del Festival di Primavera 2026 — entrando nel territorio di una versatilità atletica senza precedenti.
Il progetto, durato un anno e condotto in collaborazione con Unitree, non è stato certo una passeggiata. Il team di ricerca ha ammesso candidamente di aver “sacrificato” dozzine di robot G1 per riuscire a decifrare il codice del movimento dinamico universale. Considerando che il prezzo d’attacco del G1 si aggira sui 13.500 $, si tratta di un tributo hardware non indifferente versato sull’altare del reinforcement learning. L’obiettivo era ambizioso: abbattere la barriera che separa le policy addestrate per seguire un singolo movimento specifico da quelle capaci di gestire la fisica caotica di manovre estreme nel mondo reale.
L’ingrediente segreto di questo successo è un metodo di addestramento a due fasi. Inizialmente, viene pre-addestrata una policy di controllo generativa basata sul flusso (flow-based), che fornisce al robot una comprensione fondamentale del movimento. Successivamente, il modello viene rifinito tramite un processo di “actuation-aware residual RL”: un passaggio critico che permette di calibrare il sistema tenendo conto delle complesse dinamiche e dei limiti fisici di un robot in carne e… metallo. Secondo i ricercatori, questa seconda fase è stata la chiave di volta per trasferire con successo la policy dalla simulazione alla realtà. Con un gesto che farà la gioia dell’intera comunità robotica, i checkpoint del modello sono stati resi pubblici su GitHub.
Perché è un punto di svolta?
Lo sviluppo di una singola policy unificata per una gamma così vasta di movimenti ad alto impatto rappresenta una pietra miliare. Segna il passaggio dai “robot specialisti”, capaci di eseguire un unico trick spettacolare, ai “robot generalisti”, dotati di un repertorio fisico completo e adattabile. Riuscendo a colmare il famigerato “sim-to-real gap” per dinamiche estreme, OmniXtreme offre un framework solido per creare umanoidi più robusti, versatili e fisicamente competenti. La scelta dell’open-source, inoltre, promette di accelerare vertiginosamente la corsa verso i ginnasti e i ballerini robotici di domani.












