Aggiungere un terzo robot alla propria flotta non dovrebbe far collassare l’intero sistema, eppure per circa il 90% dei team di robotica, questa è la cruda realtà. La complessità del coordinamento multi-robot, con la sua dipendenza cronica da controller centralizzati e connessioni a banda larga, è da sempre un famigerato collo di bottiglia. Ma i ricercatori della Oregon State University hanno appena tracciato la rotta per un futuro in cui le squadre di robot si coordinano con l’intelligenza silenziosa ed emergente di una colonia di formiche.
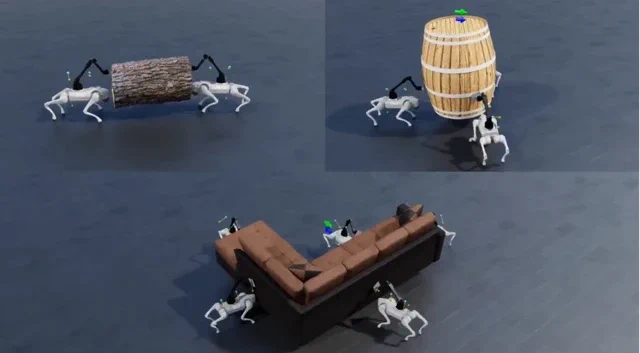
Il loro nuovo studio, intitolato decPLM (Decentralized Pinch-Lift-Move), è stato accettato alla IEEE International Conference on Robotics and Automation (ICRA) 2026 — che nel mondo della robotica equivale a ottenere un posto come headliner al Coachella. Il sistema permette a un team di robot quadrupedi dotati di braccio meccanico di sollevare e spostare in cooperazione oggetti pesanti e difficili da afferrare, come tronchi, barili o persino un divano, il tutto senza scambiarsi un singolo bit di informazione. Niente nodo centrale, niente Wi-Fi, nessuno scambio frenetico di comandi a livello di giunti. Al contrario, la coordinazione emerge puramente dal modo in cui i robot percepiscono le forze esercitate sull’oggetto che stanno trasportando, utilizzando esclusivamente i propri sensori interni — un concetto noto come propriocezione.
Il segreto sta in una “policy” condivisa, addestrata con un ingegnoso sistema chiamato “Constellation Reward”, che sprona i robot ad agire come se fossero rigidamente ancorati al carico. Questo approccio decentralizzato è sorprendentemente efficace e scalabile. La policy è stata addestrata in simulazione usando solo due robot, ma è in grado di generalizzare il comportamento a team composti fino a dieci unità senza alcun bisogno di riaddestramento. Questo permette di schivare i tipici incubi di rete che affliggono i sistemi multi-robot, dove l’aggiunta di nuovi agenti porta spesso a latenze paralizzanti e a una complessità ingestibile.
Perché è un punto di svolta?
Questa ricerca ribalta un assunto comune: l’idea che più robot equivalgano a più problemi. Con decPLM, più robot significano in realtà meno errori. Il team ha scoperto che, scalando la flotta da due a dieci robot, l’errore di tracciamento del carico è diminuito di uno sbalorditivo 80%. La ridondanza di un team più numeroso compensa naturalmente gli errori individuali, portando a un’operazione più fluida e precisa.
Eliminando la “stampella” della comunicazione, la Oregon State ha creato un sistema intrinsecamente più robusto, scalabile e adattabile. È il segnale di un futuro in cui schierare uno sciame di robot logistici sarà semplice come aggiungere un’unità al gruppo, senza dover riprogettare l’intera architettura di rete. Come sottolinea schiettamente la fonte, questo lavoro conferma che “il collo di bottiglia nella robotica non è più la capacità dell’hardware — è l’infrastruttura di Machine Learning”.
