In una mossa che sta facendo sudare freddo gli ingegneri hardware abituati a vivere sotto l’ala protettrice dei non-disclosure agreement, Roboparty ha deciso di far saltare il banco. L’azienda ha rilasciato il codice sorgente full-stack e i blueprint hardware completi del suo robot bipede Roboto_Original. Questa trasparenza radicale è un guanto di sfida lanciato alla cultura del “segreto industriale” che domina il settore: secondo le stime, questo modello open-source potrebbe abbattere i costi di sviluppo per i nuovi team di un impressionante 80%.
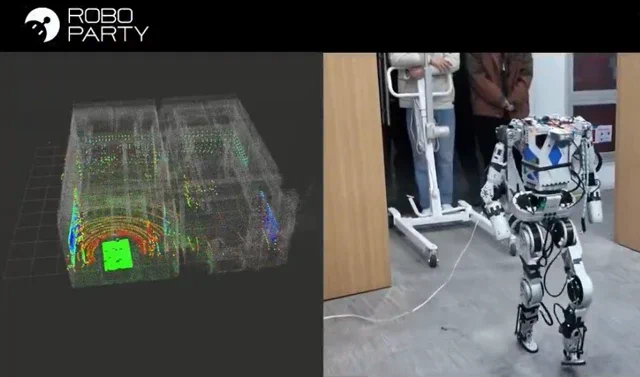
Non stiamo parlando di una manciata di file CAD buttati lì per fare scena; Roboparty ha letteralmente aperto il cofano e mostrato ogni ingranaggio. Il rilascio include i disegni strutturali completi, le distinte base elettroniche (EBOM), una lista dettagliata dei fornitori e persino gli algoritmi di controllo del movimento AMP. Il robot non è certo un giocattolo: alto 1,2 metri per 30 kg di peso, è capace di raggiungere una velocità di corsa rispettabile di 3 m/s (circa 11 km/h). Il design sfrutta una struttura di derivazione automotive e giunti modulari, dimostrando che l’hardware open-source può tranquillamente competere con i giganti del settore in termini di performance. Per gli sviluppatori c’è una chicca in più: il supporto al modello SMPL-X, che permette di sfruttare direttamente i dati di motion capture umano per addestrare l’andatura del bot in modo rapido e preciso.
Perché questo annuncio cambia le regole del gioco?
Rendendo open-source una piattaforma bipede completa e ad alte prestazioni, Roboparty sta attaccando frontalmente il problema, costoso e frustrante, del “reinventare continuamente la ruota”. Per anni, il campo della robotica è rimasto frammentato, con innumerevoli team costretti a spendere milioni per risolvere isolatamente le stesse sfide base di locomozione e hardware. Questa iniziativa offre un’infrastruttura condivisa, permettendo a ricercatori e startup di saltare il lavoro sporco iniziale per concentrarsi sulla creazione di utilità reale, invece di limitarsi all’ennesimo video di “acrobazie da social”. Se l’esperimento avrà successo, potremmo assistere alla nascita di un ecosistema collaborativo capace di accelerare l’intero settore dell’intelligenza incarnata (embodied intelligence).
Per chi è pronto a fare il “fork” del futuro della robotica, l’intero progetto è disponibile su GitHub con la relativa documentazione ufficiale.












