Chi ha detto che non si può insegnare nuovi trucchi a un vecchio cane? In questo caso, non si tratta di un cane, ma di un robot quadrupede che sta imparando a fare molto più che semplici recuperi. Grazie a una collaborazione rivoluzionaria tra Carnegie Mellon University, Google DeepMind e Bosch, i nostri amici a quattro zampe stanno alzando il livello con un sistema chiamato Human2LocoMan. Non è solo una passeggiata nel parco; è un salto nel futuro della robotica!
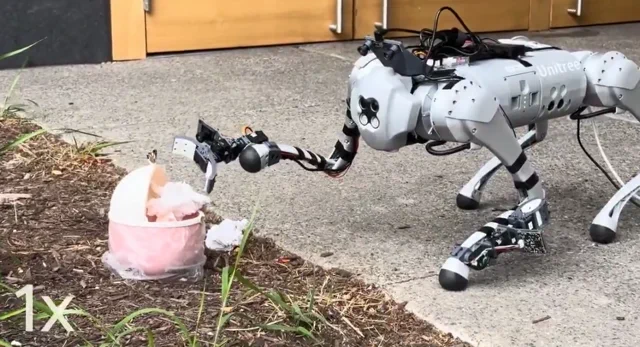
L’ingrediente segreto? I dati umani. Pre-addestrando le policy dei robot sui movimenti umani prima di perfezionarle sull’hardware reale, questi brillanti ricercatori hanno creato un quadrupede che non è solo veloce e agile, ma può anche manipolare oggetti con finezza. Immaginate un cane robot che non solo può inseguire una palla, ma prenderla, organizzare i suoi giocattoli e persino fare un po’ di pulizie leggere. L’immagine mostra una di queste meraviglie meccaniche che allunga il braccio per interagire con un oggetto a terra, dimostrando la sua nuova destrezza.
Non è solo un trucco da festa; è un significativo passo avanti nella robotica. Il sistema Human2LocoMan, alimentato da un Transformer a Embodiment Incrociato Modularizzato (MXT), apprende sia dalle dimostrazioni umane che da quelle robotiche. Il risultato? Una riduzione del 50% dei dati robotici necessari e un impressionante miglioramento dell'80% nei tassi di successo quando affronta ambienti sconosciuti. È come mandare il tuo robot a un corso intensivo su “Come Essere Più Umano” e vederlo laurearsi con lode. Chissà, con abilità come queste, potremmo presto vedere quadrupedi assumere lavori che non avremmo mai pensato possibili. Robo-baristi, qualcuno?