De quoi donner des sueurs froides aux ingénieurs en robotique du monde entier au moment de mettre à jour leur CV : Anthropic vient de révéler que son dernier modèle, Claude Opus 4.7, est capable de programmer un robot physique près de 38 fois plus vite qu’une équipe humaine. Selon les résultats de l’étude « Project Fetch Phase Two » menée par l’entreprise, l’IA a accompli de manière autonome une série de tâches complexes en seulement 9 minutes et 35 secondes. Pour le même travail, une équipe humaine non assistée a eu besoin de 361 minutes.
On ne parle pas ici d’une simple amélioration incrémentale, mais d’un véritable saut quantique. Il y a peine dix mois, en août 2025, Anthropic lançait la première phase de cette expérience. À l’époque, le modèle phare Opus 4.1 avait échoué dès la première étape : établir la connexion avec le « chien-robot » quadrupède. Une équipe humaine épaulée par Claude avait alors mis 181 minutes pour terminer les tâches, tandis que l’équipe livrée à elle-même avait bataillé pendant plus de six heures. Aujourd’hui, Opus 4.7 ne s’est pas contenté de se connecter ; il a bouclé l’intégralité du workflow 19 fois plus vite que le tandem humain-IA du premier essai.

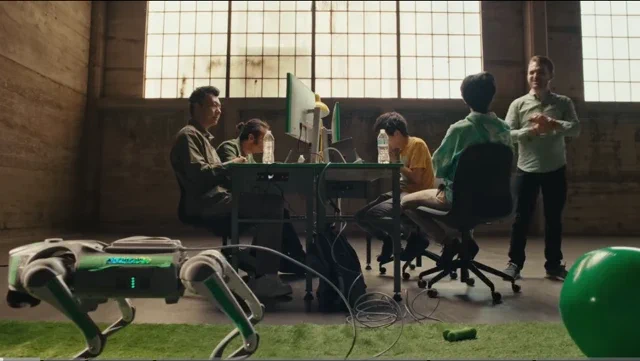
Les missions confiées n’avaient pourtant rien de trivial : il fallait se connecter aux caméras et aux capteurs LiDAR du robot, coder un programme de surveillance de trajectoire et utiliser la vision par ordinateur pour détecter un ballon de plage. Le seul rôle du chercheur humain a consisté à brancher un ordinateur portable, à fournir le prompt initial et à valider les actions de l’IA. Cette dernière a géré tout le reste, de la recherche des bibliothèques logicielles appropriées à l’écriture et l’exécution du code.
Pourquoi est-ce une révolution ?
La révélation la plus frappante d’Anthropic est que ce gain de performance massif n’est pas le fruit d’un entraînement spécifique à la robotique. C’est une « capacité émergente » qui a surgi naturellement de la montée en puissance globale de l’IA — cette même force qui booste les chatbots et les générateurs d’images. Cela suggère qu’à mesure que les modèles de fondation gagnent en intelligence, ils deviennent intrinsèquement plus aptes à interagir avec le monde physique et à le programmer.
Le secret technique réside dans ce qu’Anthropic appelle une « boucle agentique » (agentic loop) : le modèle analyse le contexte, entreprend une action (comme écrire du code), vérifie le résultat, puis recommence le cycle. Opus 4.7 a fonctionné avec une « pensée adaptative poussée au maximum », un mode de raisonnement qui permet au modèle de réfléchir entre chaque étape. C’est ce raisonnement entrelacé qui permet à l’IA de repérer une erreur, comme un échec de connexion à un capteur, et de corriger sa commande suivante sans attendre qu’un humain ne vienne débugger le problème. Si Anthropic note que le modèle peine encore sur des tâches de précision motrice fine, la barrière à l’entrée pour rendre des robots opérationnels vient de voler en éclats. Le goulot d’étranglement ne concerne plus la fabrication du matériel, mais la vitesse à laquelle on peut le programmer. Et pour l’instant, les paris sont ouverts : le silicium semble avoir pris une avance décisive.