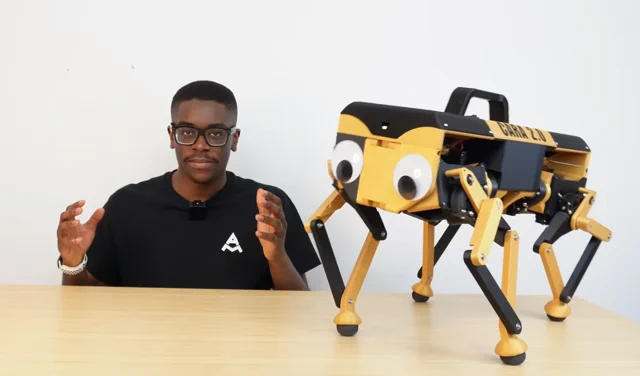
Le maker et YouTubeur Aaed Musa est de retour avec une version survitaminée de son chien robot à câbles, et les chiffres sont pour le moins impressionnants. Baptisé CARA 2.0, ce nouveau prototype issu d’un projet de fin d’études en ingénierie réussit le tour de force de diviser par deux le coût de son prédécesseur, passant de 3 000 $ à un tarif beaucoup plus digeste de 1 450 $. Côté balance, c’est aussi une véritable cure d’amincissement : le robot a perdu 42 % de sa masse, affichant désormais un svelte 8,26 kg contre 14,25 kg auparavant. Il succède au premier CARA : La révolution du robot-chien à entraînement par câble qui nous avait bluffés par ses entraînements à cabestan (capstan drives) ingénieux et sans jeu mécanique.

Développé en équipe, le CARA 2.0 affiche une vitesse de pointe de 0,55 m/s et peut transporter une charge utile de 6,8 kg pendant environ une heure. Si l’objectif ambitieux de passer sous la barre des 1 000 $ n’a pas tout à fait été atteint, sortir un quadrupède dynamique pour 1 450 $ dans le monde du DIY reste une performance remarquable. Pour réduire la facture, l’équipe a troqué les tubes en fibre de carbone onéreux pour des structures imprimées en 3D et a sourcé des moteurs de drones bon marché — qu’il a fallu rebobiner manuellement pour tripler leur couple de sortie.
Pourquoi est-ce important ?
C’est ici que l’histoire prend un tournant inattendu : malgré le succès technique du projet, Musa a décidé de mettre au placard la technologie même qui a donné son nom au robot. CARA signifie “Capstans Are Really Awesome” (Les cabestans, c’est génial), mais après ce build, le constat de Musa est sans appel : c’est génial, certes, mais profondément impraticable. Dans son bilan, il annonce qu’il abandonne ce design et n’utilisera plus de systèmes à cabestan à l’avenir, déplorant qu’ils soient un véritable enfer à assembler.
C’est une leçon d’ingénierie classique apprise à la dure. Un concept peut être brillant sur le papier — offrant un jeu nul et des performances de haut vol — mais s’il s’avère cauchemardesque à construire et à entretenir, il finit dans une impasse industrielle. Pour son prochain quadrupède, Musa l’affirme : il utilisera des actionneurs “sur étagère”. Une conclusion pragmatique, bien qu’un peu amère, pour un projet qui a réussi à créer un chien robot plus performant et moins cher, tout en révélant que sa technologie de base était une fausse bonne idée. Pour les plus curieux, tous les détails techniques sont disponibles sur la page projet de Musa.