Le 9 avril 2026, l’Office américain des brevets (USPTO) a rendu public un document de Tesla, Inc. que personne n’attendait vraiment. Le brevet US20260097493A1 s’étale sur vingt pages, cite l’ingénieur mécanicien senior Rod Jafari comme unique inventeur, et décrit… un genou. Ici, point de réseaux de neurones, de “world models” ou de promesses de conduite autonome. On y parle de deux bielles, d’un actionneur linéaire et de quatre pivots agencés avec précision pour permettre à un humanoïde de marcher sans faire exploser les coûts de fabrication.
La demande avait été déposée le 30 septembre 2022, le jour même où Tesla tenait son deuxième AI Day et dévoilait son prototype “Bumble-C”. Ce soir-là, un ingénieur avait décrit le genou du robot comme une “articulation à quatre barres” inspirée de la biologie humaine. Trois ans et demi plus tard, les registres de brevets rattrapent enfin la réalité du terrain. Il s’agit presque certainement du genou qui équipe “Optimus 3”, qu’Elon Musk a récemment évoqué dans un post sur X fin mars 2026. Mais le plus fascinant dans ce brevet n’est pas le design final, c’est le schéma qui explique comment l’équipe y est parvenue.
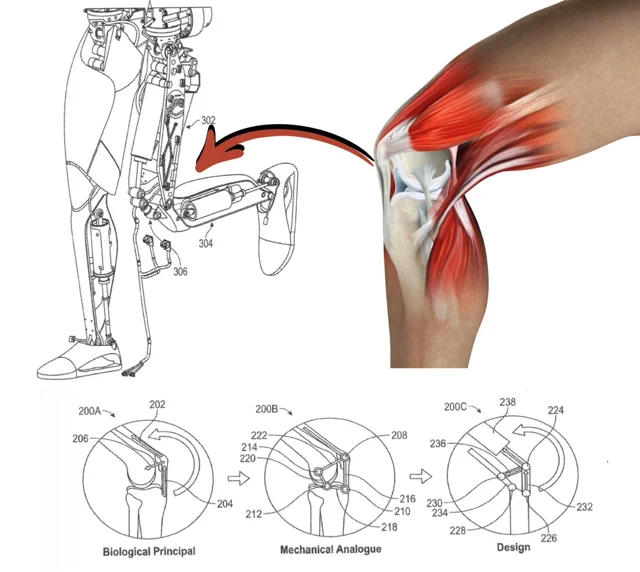
La figure 2 du brevet est une véritable genèse en trois panneaux : on part du “Principe Biologique” (un genou humain), on passe par l’ “Analogue Mécanique” (un système de liaisons abstrait), pour arriver au “Design” final. Il est rare qu’un brevet expose son raisonnement de manière aussi limpide. Le dessin dit explicitement : si cette pièce a cette forme, c’est parce que nous avons copié un mécanisme qui a déjà fait ses preuves pendant des millions d’années. Le système, un mécanisme de Hoecken inversé et modifié, imite le genou humain pour obtenir une amplitude de mouvement massive d’environ 150° à partir d’un seul petit actionneur.

Le genou biologique est un chef-d’œuvre d’efficacité. La rotule (patella) agit comme une poulie mobile, modifiant le bras de levier du quadriceps pour délivrer un couple maximal exactement au moment où la foulée en a le plus besoin. De plus, l’articulation ne pivote pas sur un point fixe ; son centre de rotation se déplace, un tour de magie géométrique opéré par les ligaments croisés qui fonctionnent, mécaniquement, comme une liaison à quatre barres. Le brevet de Tesla emprunte ces deux propriétés — un bras de levier mobile et un pivot non fixe — pour créer une articulation d’une efficacité redoutable. Le document précise qu’une rotation de seulement 60 degrés de l’actionneur se traduit par un balayage angulaire immense pour le bas de la jambe.

Pourquoi est-ce crucial ?
Il ne s’agit pas seulement d’une prouesse d’ingénierie ; c’est la clé de voûte pour produire des humanoïdes à grande échelle. Toute la philosophie de conception détaillée dans le brevet tourne autour de la réduction des coûts. Un seul actionneur linéaire est moins cher, plus léger et plus simple qu’une articulation multi-moteurs. Son efficacité énergétique permet d’utiliser une batterie plus petite et plus légère, réduisant encore la masse totale et le prix de revient du robot. Quand l’objectif affiché est de vendre Optimus entre 20 000 € et 30 000 €, chaque gramme et chaque euro économisé sur une articulation se multiplie par millions d’unités produites.
C’est ce genre d’ingénierie pragmatique qui rend le plan de Tesla — remplacer les lignes de production des Model S et Model X à l’usine de Fremont par une ligne Optimus — un peu moins insensé. Le design en lui-même n’est pas totalement unique : des analystes ont noté que l’humanoïde IRON de nouvelle génération de Xpeng, dévoilé fin 2025, utilise un mécanisme de Hoecken inversé très similaire. Cependant, le design de Tesla étant public depuis l’AI Day 2022, il semble s’agir davantage d’une évolution convergente vers une solution optimale que d’une simple imitation.
L’évolution a mis des millions d’années à perfectionner cette géométrie. Tesla doit y parvenir avec un budget serré, et vite. Ce brevet nous donne un aperçu de la méthode employée pour réussir ce tour de force.