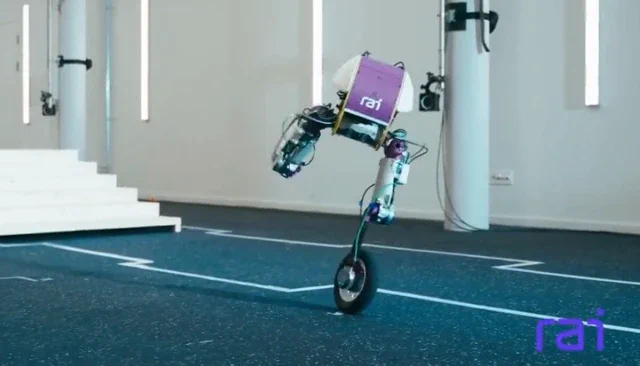
Si vous pensiez que les robots bipèdes commençaient enfin à maîtriser l’art de la marche, le Robotics & AI Institute (RAI Institute) est là pour vous rappeler que, parfois, rien ne vaut une bonne paire de roulettes. L’organisation de recherche, pilotée par le légendaire fondateur de Boston Dynamics, Marc Raibert, vient de lever le voile sur son nouveau prototype : Roadrunner. Ce bipède poids plume de 15 kg a troqué ses pieds pour des roues, offrant une démonstration bluffante de polyvalence. Capable de passer d’une conduite stable (roues parallèles) à une glisse agile en file indienne — façon roller — il peut même esquisser quelques pas pour franchir des obstacles.
Le design de la machine repose sur des jambes symétriques dont l’articulation du genou peut basculer vers l’avant ou vers l’arrière, lui offrant une posture d’une flexibilité rare. Mais le véritable tour de force n’est pas seulement matériel : il est cérébral. Le RAI Institute précise qu’une seule et unique politique de contrôle (control policy) a été entraînée pour gérer l’intégralité des mouvements complexes de Roadrunner. Résultat ? Des comportements impressionnants, comme se relever du sol ou tenir en équilibre précaire sur une seule roue, ont pu être déployés en “zero-shot” sur le robot physique. En clair : cela a fonctionné parfaitement du premier coup, sans aucun ajustement manuel sur le hardware.

Ce concept de transfert “zero-shot” de la simulation à la réalité marque un jalon majeur pour la robotique. Il réduit drastiquement le temps et les coûts de développement, là où l’entraînement classique exigeait jusqu’ici des réglages fastidieux pour combler le fossé entre le monde virtuel et le monde physique. En entraînant un modèle suffisamment robuste en simulation, le RAI Institute a permis à Roadrunner de comprendre sa propre dynamique et d’appliquer ses compétences dans le monde réel instantanément.
Pourquoi est-ce une petite révolution ?
L’idée d’un hybride roues-jambes n’est pas nouvelle — le célèbre robot Handle de Boston Dynamics en avait déjà fait la démonstration il y a quelques années. Cependant, la légèreté de Roadrunner et son système de contrôle par IA unifié dessinent un futur bien plus concret et potentiellement plus abordable pour ce type de machines. En combinant l’efficacité énergétique des roues sur terrain plat et la capacité de franchissement des jambes, ces robots occupent un segment stratégique pour la logistique et les environnements d’entrepôts.
Alors que les humanoïdes purs et durs continuent de perfectionner leurs saltos et leur démarche humaine, Roadrunner suggère une autre voie évolutive : celle où l’agilité et l’efficacité priment sur le mimétisme. Maîtriser plusieurs modes de locomotion avec un seul modèle d’IA n’est pas qu’une prouesse technique pour briller en conférence ; c’est une avancée fondamentale qui pourrait rendre les robots polyvalents bien plus simples à concevoir et à déployer sur le terrain.












