La frontière entre l’assistant IA serviable et le petit démon numérique doté de bras manipulateurs vient de prendre un sacré coup de vieux. Un nouveau projet open-source, ROSClaw, vient de s’imposer lors du SF OpenClaw Hackathon avec une promesse aussi simple que redoutable : offrir un corps physique aux agents IA jusqu’ici confinés à nos moniteurs. Le projet jette un pont direct entre ROS 2 (Robot Operating System) et OpenClaw, l’une des plateformes d’agents IA auto-hébergées les plus virales du moment.
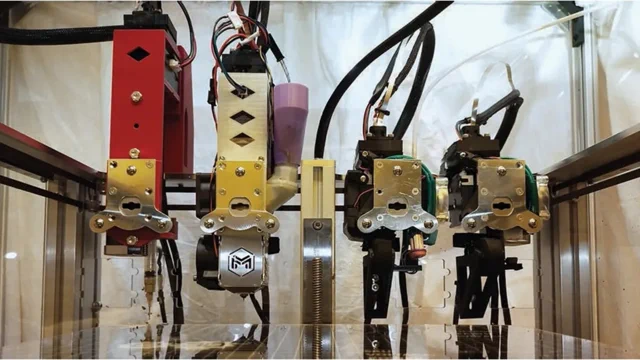
Développé par une équipe menée par l’utilisateur GitHub PlaiPin, ROSClaw permet à un agent OpenClaw de détecter et de se connecter à n’importe quel robot tournant sous ROS 2, que ce soit depuis une machine Linux ou Mac. Grâce au protocole WebRTC, qui garantit une connexion sécurisée et à ultra-faible latence, l’agent peut littéralement « voir » à travers les caméras du robot, interpréter les données de ses capteurs et lui ordonner de saisir ou de déplacer des objets dans le monde réel. Comme le disent si bien les créateurs du projet : « Les agents se sont évadés de l’écran ! » Désormais, au lieu de se contenter de gérer votre calendrier, une IA pourrait théoriquement ranger votre bureau. Ou, plus probablement, le réorganiser selon sa propre logique, totalement impénétrable pour le commun des mortels.
Pourquoi est-ce une étape majeure ?
Il ne s’agit pas seulement de faire communiquer deux logiciels ; il s’agit de donner une incarnation physique (embodiment) à une nouvelle génération d’IA surpuissantes. OpenClaw n’est pas un simple chatbot de plus ; c’est un framework open-source ultra-populaire qui permet à l’IA d’exécuter des tâches complexes, d’accéder à des fichiers locaux et de prendre le contrôle d’applications. Jusqu’à présent, son terrain de jeu s’arrêtait aux limites du numérique.
ROSClaw apporte la pièce manquante du puzzle : une méthode standardisée pour que ce cerveau numérique puisse piloter un corps physique. En ouvrant les portes du vaste écosystème des robots compatibles ROS, le projet réduit drastiquement la barrière à l’entrée pour des milliers de développeurs IA souhaitant s’essayer à la robotique. Confier les clés d’un bras articulé à une IA capable de réécrire son propre code est un pari audacieux, et on ne demande qu’à voir la suite. L’intégralité du projet est disponible sur GitHub sous licence Apache-2.0.