Ajouter un troisième robot à une flotte ne devrait pas faire imploser tout votre système. Et pourtant, pour environ 90 % des équipes de robotique, c’est la triste réalité. La complexité de la coordination multi-robots, qui repose traditionnellement sur des contrôleurs centralisés et une bande passante ultra-gourmande, a toujours été un goulot d’étranglement notoire. Mais des chercheurs de l’Oregon State University viennent de publier un manifeste pour un futur où les escouades de robots se coordonnent avec l’intelligence silencieuse et émergente d’une fourmilière.
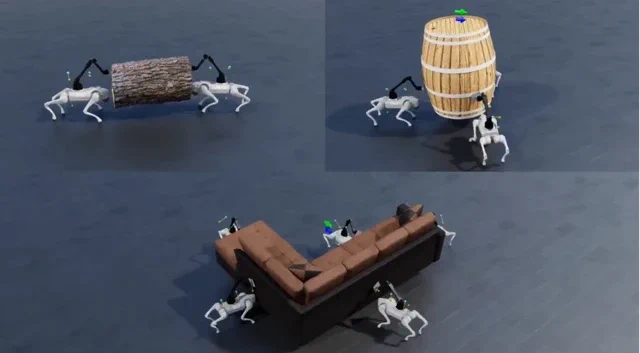
Leur nouvelle étude, baptisée decPLM (Decentralized Pinch-Lift-Move), a été acceptée pour l’IEEE International Conference on Robotics and Automation (ICRA) 2026 — l’équivalent robotique d’une tête d’affiche au festival de Coachella. Le système permet à une équipe de robots quadrupèdes équipés de bras articulés de soulever et de déplacer en coopération des objets lourds et difficiles à saisir, comme des troncs d’arbres, des barils ou même un canapé, le tout sans échanger le moindre bit de donnée. Pas de nœud maître, pas de Wi-Fi, pas d’échange frénétique de commandes au niveau des articulations. Ici, la coordination émerge purement du fait que les robots ressentent les forces exercées sur l’objet qu’ils transportent, en utilisant uniquement leurs propres capteurs internes — un concept connu sous le nom de proprioception.
Le secret de fabrication réside dans une politique partagée, entraînée via un ingénieux système de “Récompense en Constellation” (Constellation Reward). Ce mécanisme incite les robots à agir comme s’ils étaient rigidement liés à la charge utile. Cette approche décentralisée est d’une efficacité et d’une évolutivité bluffantes. Bien que la politique ait été entraînée avec seulement deux robots en simulation, elle se généralise à des équipes allant jusqu’à dix agents sans aucun réentraînement. Cela permet d’esquiver les cauchemars de réseau habituels qui empoisonnent les systèmes multi-robots, où l’ajout de nouvelles unités rime souvent avec une latence handicapante et une complexité exponentielle.
Pourquoi est-ce une révolution ?
Cette recherche prend à contre-pied une idée reçue : celle que plus de robots signifie plus de problèmes. Avec decPLM, plus de robots signifie en réalité moins d’erreurs. L’équipe a découvert qu’en passant de deux à dix robots, l’erreur de trajectoire de la charge chutait de 80 %. La redondance d’une équipe plus large permet naturellement de lisser les erreurs individuelles, rendant l’opération plus fluide et plus précise.
En se passant de la béquille de la communication, l’Oregon State a créé un système intrinsèquement plus robuste, scalable et adaptable. Cela dessine un futur où déployer un essaim de robots logistiques sera aussi simple que d’ajouter une unité au groupe, sans avoir à repenser toute l’architecture du réseau. Comme le souligne brutalement l’étude, ce travail confirme que « le véritable goulot d’étranglement de la robotique n’est plus la capacité matérielle (hardware) — c’est l’infrastructure ML. »
