Dans un geste qui risque de faire s’étouffer plus d’un ingénieur hardware avec ses propres clauses de confidentialité, Roboparty vient de publier l’intégralité du code source et des schémas techniques de son robot bipède Roboto_Original. En prônant cette transparence radicale, l’entreprise lance un pavé dans la mare de la “culture du secret” qui verrouille l’industrie, affirmant que ce modèle open-source pourrait réduire les coûts de développement des nouvelles équipes de recherche de près de 80 %.
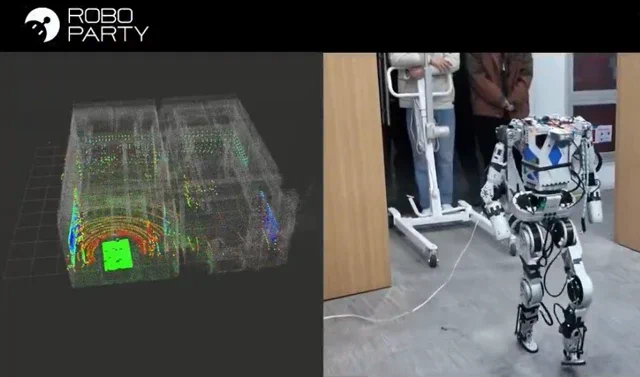
Ici, on ne parle pas de quelques fichiers CAD jetés en pâture pour faire le buzz ; Roboparty a littéralement mis toutes ses cartes sur la table. La publication inclut les plans structurels complets, la nomenclature électronique (EBOM), la liste des fournisseurs, ainsi que les algorithmes de contrôle de mouvement AMP. Côté hardware, le robot n’est pas un simple jouet : du haut de ses 1,20 m pour 30 kg, il affiche une vitesse de pointe respectable de 3 m/s (environ 11 km/h). Sa conception repose sur une structure de qualité automobile et des articulations modulaires, prouvant que le matériel open-source peut rivaliser avec les standards industriels. Pour les développeurs, le support du modèle SMPL-X permet d’exploiter directement les données de capture de mouvement humain, simplifiant drastiquement l’apprentissage de la marche.
Pourquoi est-ce une étape cruciale ?
En libérant une plateforme bipède performante et complète, Roboparty s’attaque à un problème endémique du secteur : la fâcheuse tendance à vouloir réinventer la roue à prix d’or. Pendant des années, la robotique est restée fragmentée, chaque équipe dépensant des millions pour résoudre, de son côté, les mêmes défis fondamentaux de locomotion. Cette initiative offre une infrastructure partagée, permettant aux chercheurs et aux startups de sauter la phase ingrate des bases matérielles pour se concentrer sur la véritable utilité pratique, loin des vidéos de démonstration “m’as-tu-vu” habituelles. Si le pari réussit, cela pourrait créer un écosystème collaboratif capable d’accélérer l’ensemble du domaine de l’intelligence incarnée.
Pour ceux qui sont prêts à “forker” le futur de la robotique, le projet complet est disponible sur GitHub avec sa documentation dédiée.












