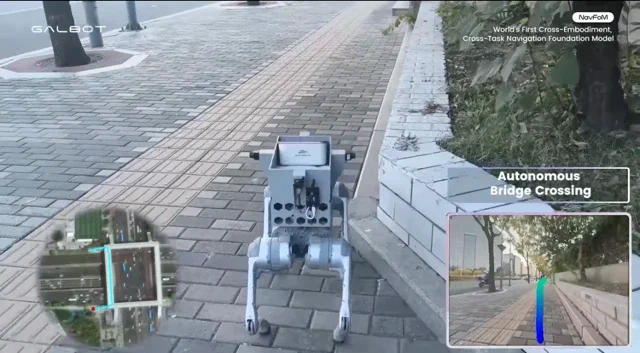
Des chercheurs de la Shanghai Jiao Tong University et de SenseTime Research viennent de frapper un grand coup avec une vidéo présentant NavFm. Ils le décrivent comme le « tout premier modèle de fondation de navigation cross-embodiment et cross-task au monde ». En clair ? Ils sont en train de concevoir un cerveau de navigation universel capable, en théorie, d’être implanté dans n’importe quel robot pour lui permettre d’aller d’un point A à un point B sans finir dans le décor. La démo met en scène un chien-robot générique qui semble avoir parfaitement dompté le parcours d’obstacles urbain.

Le quadrupède esquive les piétons avec une agilité déconcertante, reste scotché à sa cible humaine malgré les distractions visuelles et gère même une mission de livraison complexe en totale autonomie. Une fois l’ordre reçu, il trace son propre itinéraire, franchit des ponts, arpente les trottoirs et grimpe des escaliers pour atteindre son but. C’est assez bluffant : on est loin du simple jouet télécommandé ou des trajectoires préprogrammées. On sent une réelle conscience de l’environnement et une capacité de planification qui passe un sérieux cap. Bien sûr, slalomer sur des trottoirs impeccables dans une vidéo de démo est une chose ; affronter le chaos imprévisible de la jungle urbaine en est une autre — une leçon que certains véhicules de livraison autonomes apprennent d’ailleurs à la dure. Les robo-fourgons chinois n'ont peur ni du béton ni des motos
Pourquoi est-ce une petite révolution ?
Tout tient dans les concepts de « modèle de fondation » et de « cross-embodiment ». Au lieu de s’épuiser à coder manuellement la logique de navigation pour chaque nouveau robot, un modèle de fondation offre une intelligence généraliste capable de s’adapter. C’est un peu la différence entre devoir réinventer le moteur pour chaque modèle de voiture et installer un GPS universel qui fonctionne instantanément, quel que soit le véhicule.
Si les promesses de NavFm se confirment, le même cerveau qui guide ce chien pourrait piloter un drone à roues ou un humanoïde avec un minimum de réglages (fine-tuning). Ce saut technologique pourrait réduire drastiquement les temps de développement et constitue une étape cruciale vers l’avènement de robots vraiment polyvalents, capables de s’adapter à n’importe quel « corps » et à n’importe quel environnement à la volée.












