Qui a dit qu’on ne pouvait pas apprendre de nouveaux tours à un vieux chien ? Dans ce cas, il ne s’agit pas d’un chien, mais d’un robot quadrupède qui apprend à faire bien plus que simplement rapporter. Grâce à une collaboration révolutionnaire entre l’Université Carnegie Mellon, Google DeepMind et Bosch, nos amis à quatre pattes franchissent une nouvelle étape avec un système appelé Human2LocoMan. Ce n’est pas une simple promenade dans le parc, c’est un bond vers l’avenir de la robotique !
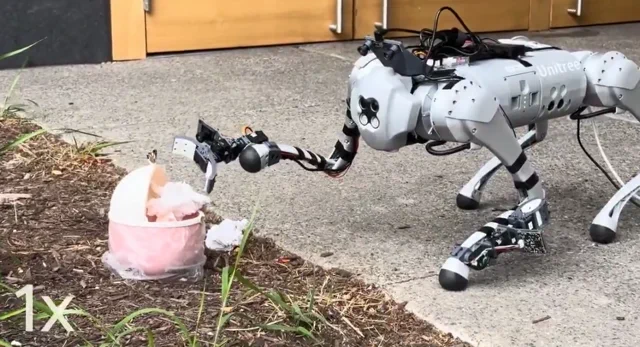
L’ingrédient secret ? Les données humaines. En préentraînant les politiques robotiques sur les mouvements humains avant de les affiner sur du matériel réel, ces ingénieux chercheurs ont créé un quadrupède non seulement rapide et agile, mais capable aussi de manipuler des objets avec finesse. Imaginez un chien robot qui peut non seulement poursuivre une balle mais aussi la ramasser, ranger ses jouets, et peut-être même faire un peu de ménage léger. L’image montre l’une de ces merveilles mécaniques tendant son bras pour interagir avec un objet au sol, démontrant sa nouvelle dextérité.
Ce n’est pas qu’un simple tour de passe-passe ; c’est une avancée significative en robotique. Le système Human2LocoMan, alimenté par un Transformateur Modulaire d’Incarnation Croisée (MXT), apprend à partir de démonstrations humaines et robotiques. Le résultat ? Une réduction de 50% des données robotiques nécessaires et une amélioration impressionnante de 80% des taux de réussite dans des environnements inconnus. C’est comme envoyer votre robot à un cours intensif “Comment être plus humain” et le voir obtenir son diplôme avec mention. Qui sait, avec de telles compétences, nous pourrions bientôt voir des quadrupèdes occuper des emplois que nous n’aurions jamais crus possibles. Des robo-baristas, peut-être ?