Si vous avez déjà tenté de construire une main robotique, vous savez que c’est un cauchemar d’ingénierie. Reproduire la préhension délicate et adaptable d’une main humaine est l’un des boss de fin des défis robotiques. Le défi principal ne consiste pas seulement à ajouter plus d’articulations ; il s’agit de créer un système capable de s’adapter à des objets aux formes irrégulières sans nécessiter un moteur lourd et énergivore pour chaque point d’articulation. La plupart des conceptions sont trop rigides, trop complexes ou trop fragiles pour le monde réel.
Et voici Tesla. Une demande de brevet récemment publiée (WO2024/073138A1) pour la main Optimus Gen 2 lève le voile sur leur philosophie de conception, et c’est une leçon magistrale d’efficacité brutale. Au lieu de courir après la complexité, les ingénieurs de Tesla ont misé sur une physique astucieuse, une mécanique robuste et un éthos de conception qui crie haut et fort : « conçu pour la production de masse, pas juste pour des démos ».
L’avantage du sous-actionnement
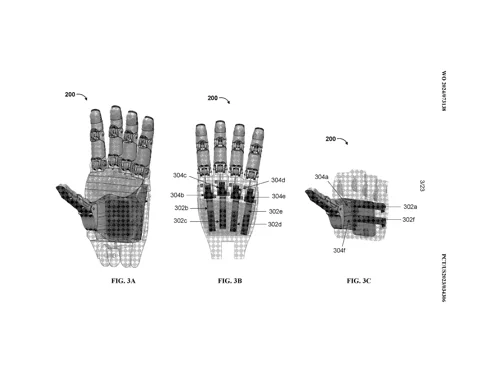
Le cœur de la conception de Tesla est un système « sous-actionné », un concept où moins de moteurs sont utilisés que le nombre total d’articulations. Pour la main d’Optimus, six actionneurs animent onze articulations – deux pour le pouce et une pour chacun des quatre doigts. Ceci est réalisé grâce à un système à câbles qui fonctionne comme un tendon biologique. Un seul câble traverse chaque doigt et, lorsqu’il est tiré, il fait se courber les articulations dans un mouvement naturel et séquentiel.
Cette approche résout le problème de l’adaptabilité. Parce que les articulations ne sont pas contraintes à suivre une trajectoire rigide et prédéterminée, les doigts peuvent épouser passivement la forme d’un objet, qu’il s’agisse d’une perceuse électrique ou d’un œuf délicat. C’est une forme d’« intelligence mécanique » qui délègue les calculs complexes de préhension du logiciel au matériel lui-même.
Mais les ingénieurs de Tesla ont ajouté un coup de génie crucial. Les ressorts de torsion à la base de chaque doigt sont délibérément plus rigides que ceux de l’extrémité du doigt. Cela crée une « intelligence passive » où l’articulation plus faible de l’extrémité du doigt se plie en premier pour envelopper un objet, suivie par l’articulation de base, plus robuste. Cela garantit une préhension sûre, un « enserrement » automatique, sans que le processeur central du robot ait à se casser la tête.
Vis sans fin : la puissance gratuite pour les charges lourdes
La pépite d’ingénierie la plus brillante dissimulée dans ce brevet est peut-être l’utilisation d’une transmission à vis sans fin et roue tangente pour les actionneurs. Il ne s’agit pas seulement de transformer la rotation d’un moteur en traction de câble ; c’est un tour de passe-passe physique avec des implications colossales en matière d’efficacité.
Les transmissions à vis sans fin sont généralement « irréversibles ». En raison du frottement élevé et de l’angle prononcé des dents de l’engrenage, la roue de sortie ne peut pas entraîner la vis sans fin d’entrée. Pour un robot, c’est un super-pouvoir. Une fois qu’Optimus saisit un objet lourd, les engrenages verrouillent mécaniquement la prise. Les moteurs peuvent alors se détendre complètement, maintenant le poids sans aucune consommation électrique. Comparé aux mains à entraînement direct qui doivent constamment brûler de l’énergie pour lutter contre la gravité, c’est une victoire monumentale pour l’autonomie de la batterie et la gestion thermique.
Cette configuration offre également une réduction d’engrenage massive en un seul étage compact, permettant à de minuscules moteurs à grande vitesse de générer une force de préhension à broyer les os tout en étant parfaitement logés dans la paume.
Conçue pour le monde réel : Durabilité et Précision
Un concept génial sur le papier ne vaut rien s’il lâche après un millier de cycles. Le brevet révèle une obsession profonde pour la fiabilité à long terme.
L’un des points de défaillance les plus critiques dans les systèmes à câbles est la fatigue et l’étirement des câbles. Tesla y remédie avec deux solutions ingénieuses :
- L’astuce de la courbure convexe : Au lieu de laisser le câble se plier brusquement sur une articulation, une surface courbe lisse et convexe est moulée entre les maillons du doigt. Cela force le câble à se courber sur un rayon sûr, prolongeant considérablement sa durée de vie.
- Le tendeur automatique : Dissimulé à l’intérieur de l’extrémité du doigt se trouve un mécanisme à ressort qui tire constamment sur l’extrémité du câble. Cela absorbe automatiquement tout mou à mesure que le câble s’étire avec le temps, garantissant que la main reste tendue et réactive pendant des années sans entretien manuel.
Pour la détection, Tesla a contourné les capteurs mécaniques volumineux et sujets aux pannes. Au lieu de cela, un aimant annulaire permanent est intégré autour de chaque pivot d’articulation. Un capteur à effet Hall stationnaire mesure le champ magnétique changeant à mesure que l’articulation tourne, offrant une détection d’angle précise, sans frottement et sans usure. Cette approche sans contact est cruciale pour maintenir une précision sub-millimétrique sur des millions de cycles.
Plus qu’une main, c’est une philosophie
En parcourant le langage dense et technique du brevet, une image claire se dessine. Tesla ne construit pas une curiosité de laboratoire ; elle conçoit un produit destiné à la production de masse et au déploiement dans le monde réel, désordonné et imprévisible. Chaque décision – des engrenages irréversibles aux tendons à tension automatique – est optimisée pour l’efficacité, la durabilité et la fabricabilité.
Alors que d’autres robots humanoïdes peuvent se vanter de plus de degrés de liberté ou d’actionneurs plus exotiques, la main d’Optimus représente une approche pragratique, axée sur la résolution des problèmes fondamentaux de la manipulation robotique de la manière la plus simple et la plus robuste possible. C’est une conception qui comprend que dans le monde réel, la fiabilité et l’efficacité l’emporteront toujours sur la complexité tape-à-l’œil. Et c’est cela, plus que toute autre caractéristique, qui rend cette conception si fascinante.
