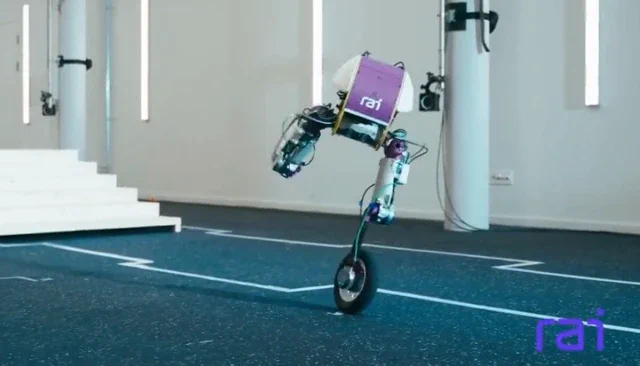
Si creías que los robots bípedos por fin estaban dominando el arte de caminar, el Robotics & AI Institute (RAI Institute) ha llegado para recordarnos que, a veces, la evolución simplemente prefiere rodar. La organización de investigación, capitaneada por el legendario fundador de Boston Dynamics, Marc Raibert, acaba de presentar a Roadrunner, un prototipo de apenas 15 kg que ha decidido jubilar los pies en favor de un par de ruedas. Esta máquina es un fascinante ejercicio de locomoción híbrida, capaz de alternar entre una conducción con ruedas en paralelo, un modo de “patinaje” en línea extremadamente ágil e incluso pequeños pasos para sortear obstáculos.
La clave de su movilidad reside en unas piernas simétricas que pueden articular la rodilla tanto hacia adelante como hacia atrás, otorgándole una flexibilidad postural asombrosa. Pero la verdadera magia no está en los actuadores, sino en su “cerebro”. Según el RAI Institute, se entrenó una única política de control para gestionar todos los complejos movimientos de Roadrunner. Esto permitió que comportamientos impresionantes, como levantarse del suelo o mantener el equilibrio de forma precaria sobre una sola rueda, se ejecutaran mediante una transferencia “zero-shot” al robot físico. En otras palabras: funcionó a la primera, sin necesidad de ajustes específicos ni calibraciones tediosas sobre el hardware real.

El concepto de transferencia “zero-shot” de la simulación a la realidad representa un hito crítico en la robótica moderna. Reduce drásticamente el tiempo y los costes de entrenamiento, eliminando ese “valle de la muerte” donde los robots suelen fallar al intentar aplicar en el mundo físico lo aprendido en entornos virtuales. Al entrenar una política lo suficientemente robusta en simulación, el RAI Institute ha logrado que Roadrunner comprenda su propia dinámica y aplique sus habilidades en el mundo real de forma instantánea.
¿Por qué es esto importante?
Los híbridos de patas y ruedas no son una idea nueva —el famoso robot Handle de Boston Dynamics ya nos dejó boquiabiertos hace años—. Sin embargo, el diseño ultraligero de Roadrunner y su avanzado sistema de control por IA unificado apuntan hacia un futuro mucho más pragmático y, potencialmente, más económico. Al combinar la eficiencia energética de las ruedas en superficies llanas con la capacidad de las piernas para superar obstáculos, estos robots encuentran el punto de equilibrio ideal para entornos logísticos y almacenes.
Mientras los humanoides de pura cepa siguen perfeccionando el arte de caminar, correr y hacer volteretas, Roadrunner sugiere una ruta evolutiva distinta: una donde la agilidad y la eficiencia operativa pesan más que el mimetismo con la forma humana. Dominar múltiples formas de locomoción con un solo modelo de IA no es solo un truco de ingeniería impresionante; es un avance fundamental que podría simplificar enormemente el desarrollo y despliegue de robots versátiles en el mundo real.












