Hablemos de una vez del elefante en la sala blanca. Mientras los inversores de capital riesgo se pisan unos a otros para financiar el próximo milagro bípede, una verdad tan silenciosa como condenatoria se esconde a plena vista: a pesar de los miles de millones invertidos, el trabajo útil total realizado por esta nueva oleada de robots avanzados es, siendo generosos, un mero error de redondeo.
En una reciente y brutalmente honesta columna, Yang York, cofundador de Dyna, le ha metido el bisturí al hype del sector, y el panorama que describe no es precisamente alentador. Olvidaos de esos vídeos promocionales tan pulidos de robots haciendo parkour o manipulando un huevo con delicadeza quirúrgica. La verdadera historia está en los números, y estos nos hablan de una desconexión profunda. Entre 2022 y 2025, la industria de la robótica ha succionado más de 18.000 millones de dólares en financiación. Sin embargo, a principios de 2026, el impacto en el mundo real sigue siendo infinitesimal.
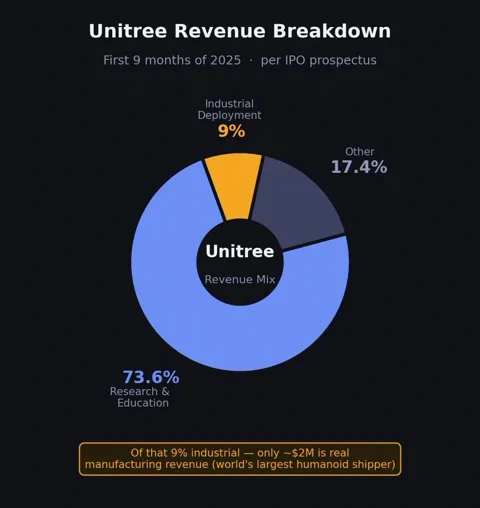
York señala a los “niños mimados” del boom del hardware. Elon Musk, de Tesla, admitió en una llamada de resultados en enero de 2026 que, efectivamente, no había ni un solo robot Optimus realizando tareas útiles en sus fábricas. Por su parte, Unitree, posiblemente el mayor distribuidor de humanoides del mundo, reveló en su folleto de salida a bolsa de marzo que un asombroso 73,6% de sus ingresos provenía de ventas para investigación y educación. ¿Despliegue industrial real? Un escaso 9%, y la mayoría dedicado a tareas de “recepción de empresas y guía de visitas”. Los ingresos por tareas de fabricación reales fueron de unos paupérrimos 2 millones de dólares.
Este abismo entre las expectativas financieras y la realidad física es lo que York define como “la burbuja”. Y no se trata de si la tecnología funcionará algún día. Se trata de los plazos. Como él mismo dice: “Una burbuja es la brecha entre la capacidad técnica actual y las expectativas humanas, multiplicada por el tiempo”.
Tu analogía con los LLM es mala (y deberías sentirte mal por ello)
Uno de los pilares del argumento de York es que la industria de la robótica está “enganchada” a una mercancía defectuosa: las analogías equivocadas. Inversores y fundadores, embriagados por el crecimiento exponencial de los Modelos de Lenguaje de Gran Tamaño (LLM), intentan aplicar el mismo manual de estrategias al mundo de los átomos, y el fracaso está siendo espectacular.
Los LLM escalaron a la velocidad del rayo porque son puro software, distribuido instantáneamente a miles de millones de personas a través de internet. Los robots, sin embargo, son físicos. Se rompen. Necesitan mantenimiento. Tienen que navegar por el caos sucio e impredecible del mundo real.
La otra analogía tentadora, e igualmente errónea, es la de la industria de los vehículos autónomos (AV). Pero ni siquiera esa encaja. Un coche es útil incluso sin conducción autónoma; es una categoría de producto establecida, un canal de distribución esperando una actualización de IA. Un humanoide sin inteligencia, bromea York, es “una máquina de 27 kilos con 28 grados de libertad y ningún propósito”. No tiene una base de usuarios integrada. No hay un parque instalado que actualizar. La industria está intentando construir la aplicación, el teléfono y la red móvil, todo al mismo tiempo.
Esto significa que la robótica no tendrá una curva de despegue en forma de LLM. Ni siquiera tendrá una curva tipo vehículo autónomo. Tendrá una curva “estilo robótica”, y la negativa de la industria a aceptar esto es su error más costoso.
Las tres grandes mentiras de la robótica moderna
York identifica tres falacias fundamentales que sostienen la burbuja del hype. Son esas pequeñas mentiras piadosas que la industria se cuenta a sí misma mientras cobra otro cheque de nueve cifras.
1. El hardware no es un canal de distribución
El error más caro es creer que enviar un robot físico es lo mismo que construir un canal de distribución. La lógica es: mete el hardware en las instalaciones del cliente y lo demás vendrá solo. Es un error fatal.
Un canal real genera valor recurrente. Si un robot hace una demostración y luego se queda cogiendo polvo porque no alcanza el umbral de retorno de inversión (ROI), no tienes un canal. Tienes un pisapapeles carísimo. York sostiene que un verdadero canal de robótica es un sistema de despliegue full-stack: evaluación del sitio, definición de tareas, captura de datos, depuración remota y actualizaciones continuas.
“La prueba del algodón para un canal es si el siguiente despliegue es más rápido que el anterior”, escribe York. “Si no lo es, no has construido un canal. Has fabricado inventario y notas de prensa”.

2. Tu “Modelo Fundacional” son solo los cimientos
El segundo error es no entender cómo mejoran realmente los modelos de IA. Toda la conversación en robótica se ha centrado en el preentrenamiento con conjuntos de datos masivos. Pero el ingrediente secreto de los LLM modernos no es solo el preentrenamiento; es el bucle cerrado e iterativo entre ese entrenamiento previo y el feedback post-entrenamiento específico de cada dominio.
La robótica apenas ha empezado este bucle. La mayoría de los equipos están alimentando a los modelos con más y más datos a la fuerza, rezando para que surja la capacidad de forma espontánea. Pero sin la señal de post-entrenamiento de los despliegues en el mundo real —de robots fallando de verdad en la planta de una fábrica—, los modelos no pueden madurar. No existe una métrica unificada como la “perplejidad” de un LLM para optimizar. Un modelo que clava un benchmark en el laboratorio es inútil si no sabe gestionar los cambios de iluminación en un almacén real.
3. El volante de inercia está hecho de cosas aburridas
Esto nos lleva a la parte más subestimada de todo el engranaje: la infraestructura de despliegue. No se trata solo de vender; es el trabajo de ingeniería sucio y poco glamuroso de convertir un despliegue puntual en un activo reutilizable y acumulativo. Son las herramientas de diagnóstico remoto, el enrutamiento de datos y las actualizaciones fiables.
Sin este “volante de inercia”, todo el sistema se gripa. El robot no llega a entornos reales. El modelo no recibe los datos del mundo real que necesita para mejorar. La curva de capacidad se aplana, sin importar cuánta computación le eches. La burbuja, argumenta York, “vive en la brecha entre los equipos que han entendido esto y los que siguen optimizando para salir bien en los benchmarks y en los vídeos de demostración”.
La única salida es atravesarlo
Ante esta realidad, el sector se ha dividido. Algunos apuestan por “el modelo primero”, confiando en que un “cerebro” lo suficientemente potente resolverá el problema y el hardware se convertirá en una commodity. Otros apuestan por “el hardware primero”, creyendo que un cuerpo perfecto es la clave y que el software de código abierto llenará los huecos.
York y Dyna están firmemente en el tercer bando: la integración vertical. No lo eligieron porque esté de moda; lo eligieron porque, tras un año desplegando su modelo DYNA-1, descubrieron que la alternativa es imposible. Aprendieron por las malas que el despliegue no se vuelve más fácil por arte de magia. El bucle de retroalimentación tiene que cerrarse simultáneamente en la investigación, el hardware y el despliegue.
Este es el trabajo que queda por delante. No se trata de perseguir el próximo vídeo viral. Se trata del proceso minucioso de construir un sistema que haga que el décimo despliegue sea más rápido y fiable que el primero. El primer equipo que consiga descifrar ese código no solo ganará el mercado: lo definirá. Hasta entonces, lo único que estamos viendo es una feria de ciencias extremadamente cara.
