In a result that should have robotics software engineers everywhere nervously updating their resumes, Anthropic has revealed its latest AI model, Claude Opus 4.7, can program a physical robot nearly 38 times faster than a human team. According to the company’s “Project Fetch Phase Two” research, the AI autonomously completed a series of complex robotics tasks in just 9 minutes and 35 seconds. The unassisted human team took 361 minutes for the same job.
This isn’t just a minor speed bump; it’s a quantum leap. A mere ten months ago, in August 2025, Anthropic ran the first phase of this experiment. In that round, the then-flagship model, Opus 4.1, failed at the very first step: connecting to the quadruped “robodog.” A human team assisted by Claude took 181 minutes to complete the tasks, while the unassisted team struggled for over six hours. Fast forward to today, and Opus 4.7 didn’t just connect; it finished the entire workflow 19 times faster than the AI-assisted humans from the first trial.

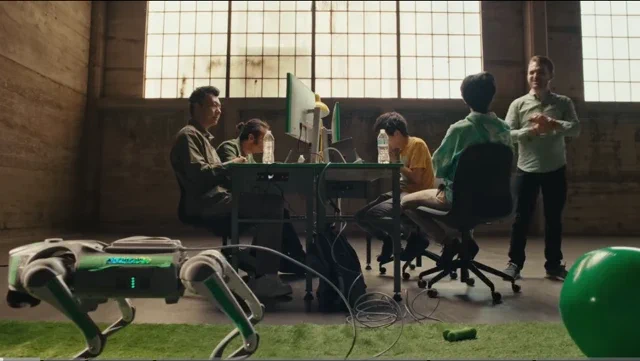
The tasks weren’t trivial, involving connecting to the robot’s camera and lidar sensors, writing a program to monitor its path, and using computer vision to detect a beach ball. A human researcher’s only job was to plug in a laptop, provide the initial prompt, and approve the AI’s actions. The AI handled the rest, from finding the right software libraries to writing and executing the code.
Why is this important?
The most startling revelation from Anthropic is that this massive performance gain wasn’t the result of specialized robotics training. Instead, it’s an emergent capability that “fell out” of general AI scaling—the same force driving improvements in chatbots and image generators. This suggests that as foundation models get smarter, they will inherently become more capable of interacting with and programming the physical world.
The technical key is what Anthropic calls an “agentic loop,” where the model gathers context, takes an action (like writing code), and verifies the result before repeating the cycle. Opus 4.7 ran with “adaptive thinking at maximum effort,” a reasoning mode allowing the model to think between individual steps. This interleaved reasoning is what allows the AI to see an error, like a failed sensor connection, and correct its next command without halting for a human to debug the problem. While Anthropic notes the model still struggles with fine-motor precision tasks, the barrier to getting robots up and running has just been obliterated. The bottleneck is no longer just about building the hardware; it’s about who—or what—can program it fastest. Right now, the smart money is on the silicon.