Adding a third robot to your fleet shouldn’t crash your entire system, yet for an estimated 90% of robotics teams, that’s the grim reality. The complexity of multi-robot coordination, with its reliance on centralized controllers and high-bandwidth communication, has been a notorious bottleneck. But researchers at Oregon State University just published a blueprint for a future where robot teams coordinate with the silent, emergent intelligence of an ant colony.
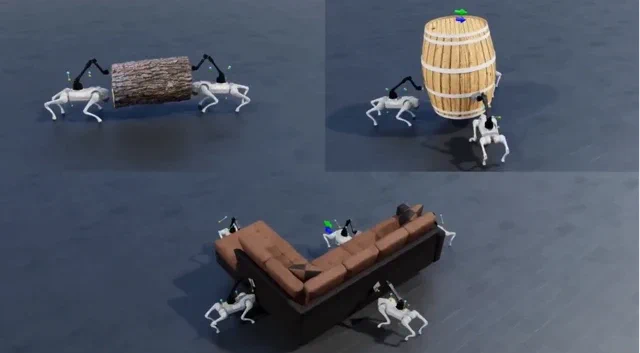
Their new paper, decPLM (Decentralized Pinch-Lift-Move), has been accepted to the IEEE International Conference on Robotics and Automation (ICRA) 2026—the robotics world’s equivalent of getting a headlining spot at Coachella. The system allows a team of quadruped-arm robots to cooperatively lift and move heavy, ungraspable objects like logs, barrels, and even a couch, all without a single bit of communication. No master node, no Wi-Fi, no frantic exchange of joint-level commands. Instead, coordination emerges purely from the robots feeling the forces exerted on the object they’re carrying, using only their own internal sensors—a concept known as proprioception.
The magic lies in a shared policy trained with a clever “Constellation Reward” system, which incentivizes the robots to act as if they are rigidly attached to the payload. This decentralized approach is shockingly effective and scalable. The policy was trained using just two robots in simulation, but it generalizes to teams of up to ten without any retraining. This sidesteps the usual networking nightmares that plague multi-robot systems, where adding more agents often leads to crippling latency and complexity.
Why is this important?
This research flips a common assumption on its head: that more robots equals more problems. With decPLM, more robots actually means less error. The team found that as the fleet scaled from two to ten robots, the tracking error for the payload dropped by a staggering 80%. The redundancy of the larger team naturally averages out individual mistakes, leading to a smoother, more precise operation.
By removing the crutch of communication, Oregon State has created a system that is inherently more robust, scalable, and adaptable. It points to a future where deploying a swarm of logistics robots is as simple as adding another unit to the group, without having to re-architect the entire network. As the source material bluntly puts it, this work validates that “the bottleneck in robotics isn’t hardware capability anymore—it’s the ML Infrastructure.”












