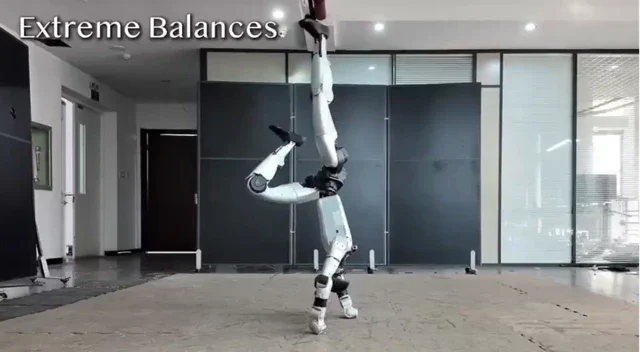
Vítejte v éře, kde humanoidní roboti už nejsou jen ztuhlými loutkami vykonávajícími jeden naučený pohyb stále dokola. Výzkumníci představili OmniXtreme – univerzální AI systém, díky kterému humanoidi zvládají salta, balancování v krkolomných pozicích, a dokonce i breakdance. Tato nová úroveň obratnosti, demonstrovaná na robotu G1 od Unitree Robotics, nechává daleko za sebou „přetrénované“ modely, které jsme vídali v naleštěných demech – jako byl sice efektní, ale jednoúčelový výkon robota WuBOT na galavečeru k čínskému novému roku 2026. OmniXtreme posouvá hranice směrem ke skutečně všestrannému robotickému atletismu.
Tento roční projekt, na kterém se podílela i společnost Unitree, si vyžádal svou daň. Tým přiznal, že při hledání receptu na univerzální dynamický pohyb „odepsal desítky robotů G1“. Vzhledem k tomu, že se G1 prodává za základní cenu kolem 12.500 €, jde o vcelku nákladnou hardwarovou oběť přinesenou na oltář posilovaného učení. Cílem výzkumníků bylo překonat bariéru mezi systémy vyvinutými pro sledování jednoho konkrétního pohybu a těmi, které si poradí s chaotickou fyzikou extrémních manévrů v reálném světě.
„Tajnou ingrediencí“ je dvoufázová metoda tréninku. Nejprve je model předtrénován pomocí generativního řízení založeného na tocích (flow-based generative control), což robotu dodá základní cit pro pohyb. Následuje fáze ladění pomocí „reziduálního posilovaného učení s vědomím aktuace“ (actuation-aware residual RL). Právě tento druhý krok byl podle vědců klíčový pro úspěšný přenos schopností ze simulace do reality (tzv. sim-to-real gap), protože dokáže přesně zohlednit komplexní dynamiku a fyzikální limity skutečného stroje. V gestu, které nepochybně nakopne celou robotickou komunitu, výzkumníci zveřejnili naučené modely na GitHubu.
Proč je to důležité?
Vytvoření jediné sjednocené strategie pro tak širokou škálu náročných pohybů je zásadním milníkem. Signalizuje odklon od robotických „specialistů“, kteří umí jeden efektní trik, směrem k „univerzálům“ s bohatým repertoárem fyzických dovedností. Tím, že OmniXtreme úspěšně překlenul pověstnou propast mezi simulací a realitou u extrémně dynamických prvků, nabízí funkční rámec pro tvorbu odolnějších a přizpůsobivějších humanoidů. Otevřený přístup k modelům pravděpodobně výrazně urychlí vývoj budoucích robotických gymnastů a tanečníků, kteří se nezhroutí při prvním nečekaném poryvu větru nebo nerovnosti terénu.












