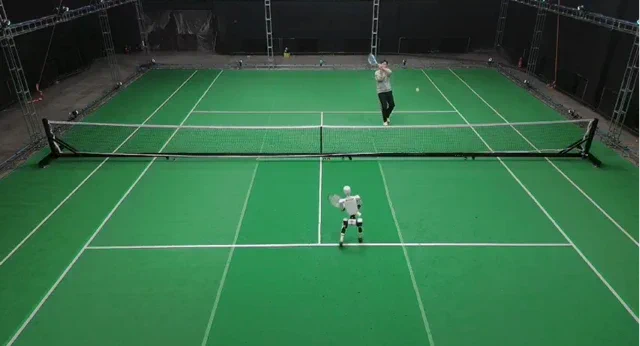
V zápletce, která by neměla překvapit nikoho, kdo pozorně sleduje překotný vývoj v AI, přišli vědci s robotem, který se naučil novou dovednost tak bravurně, že okamžitě vypráskal svého vlastního učitele. Oním sportem byl tenis a projekt s názvem LATENT naučil humanoida hrát nikoliv na základě precizních, profesionálních dat, ale z „nedokonalých“ záznamů lidského pohybu. Výsledek? Robot, který v delších výměnách s přehledem drží krok.
Projekt pod vedením výzkumníků z Tsinghua University a společnosti Galbot Inc. se zaměřil na jeden z nejtvrdších oříšků robotiky: jak naučit stroj komplexní a hbité pohyby, aniž byste měli k dispozici dokonalý manuál. Jejich systém se učí v tzv. „latentním akčním prostoru“ z fragmentovaných a zdaleka ne ideálních ukázek lidské hry. Hlavním trumfem je vysokoúrovňová AI strategie, která funguje jako digitální kouč – opravuje a kombinuje tyto nedokonalé základní dovednosti tak, aby robot dokázal úspěšně vrátit míček přes síť. Celý proces se piluje v simulaci, než je pomocí metody sim-to-real transfer nasazen na ostrý hardware, v tomto případě na humanoidního robota Unitree G1.

Chleba se ale láme až v praxi, nebo v tomto případě na výsledkové tabuli. Podle hlavního autora projektu, kterým je Zhikai Zhang, byla křivka učení neuvěřitelně strmá. „První den nasazení v reálném světě robot nedokázal vrátit ani jeden míček, který jsem mu podal,“ přiznal Zhang. „Poslední den projektu už jsem ho nedokázal porazit.“ Pro ty, kteří se chtějí ponořit do technických detailů nebo si snad vytrénovat vlastního tenisového přemožitele, tým zpřístupnil podrobnosti i kód. Odkazy zde: Stránka projektu a GitHub repozitář.
Proč je to důležité?
Tady nejde jen o to, že osamělí tenisoví profíci získali nového parťáka na trénink. Skutečným průlomem systému LATENT je jeho schopnost učit se z „nepořádných“ a neúplných dat. Většina robotických tréninků vyžaduje úzkostlivě vyčištěné datasety, jejichž tvorba je drahá a časově náročná. Tím, že se robot naučí korigovat a kombinovat chybné příklady, může tento přístup dramaticky urychlit výuku komplexních úkolů pro reálný svět. Je to významný krok směrem k robotům, kteří se dokáží učit „za pochodu“ v nepředvídatelném prostředí – od skladů až po záchranné operace v katastrofických zónách – aniž by pokaždé potřebovali naprosto bezchybnou instruktáž.












