Přidat do flotily třetího robota by teoreticky nemělo znamenat kolaps celého systému, ale pro odhadovaných 90 % robotických týmů je to přesně ta krutá realita, se kterou se potýkají. Komplexita koordinace více strojů, závislost na centrálních řadičích a nutnost vysokorychlostního připojení byly až dosud pověstným úzkým hrdlem celého odvětví. Vědci z Oregon State University však právě publikovali manifest pro budoucnost, kde robotické týmy spolupracují s tichou, přirozenou inteligencí mravenčí kolonie.
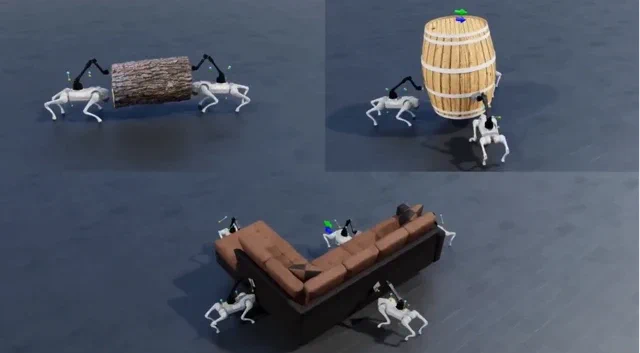
Jejich nová vědecká práce s názvem decPLM (Decentralized Pinch-Lift-Move) byla přijata na mezinárodní konferenci IEEE ICRA 2026 – což je v robotickém světě v podstatě ekvivalent hlavního vysílacího času na Coachelle. Systém umožňuje týmu čtyřnohých robotů vybavených rameny kooperativně zvedat a přenášet těžké, špatně uchopitelné objekty, jako jsou klády, barely nebo dokonce pohovka, a to bez jediného bitu vzájemné komunikace. Žádný řídicí uzel, žádná Wi-Fi, žádná zběsilá výměna příkazů o poloze kloubů. Místo toho koordinace vzniká čistě tím, že roboti cítí síly působící na předmět, který nesou, za použití vlastních interních senzorů – koncept známý jako propriocepce.
Kouzlo spočívá ve sdílené strategii (policy) vytrénované pomocí chytrého systému „konstelačních odměn“ (Constellation Reward). Ten roboty motivuje k tomu, aby se chovali, jako by byli k nákladu pevně přirostlí. Tento decentralizovaný přístup je šokující svou efektivitou a škálovatelností. Strategie byla v simulaci vytrénována pouze se dvěma roboty, ale bez jakéhokoli dalšího učení ji lze aplikovat na týmy o deseti členech. Tím se elegantně obcházejí obvyklé síťové noční můry multi-robotických systémů, kde přidání každého dalšího agenta obvykle vede k neúnosné latenci a chaosu.
Proč je to tak zásadní?
Tento výzkum staví na hlavu zažité dogma, že více robotů automaticky znamená více problémů. S decPLM totiž více robotů paradoxně znamená méně chyb. Tým zjistil, že když se flotila rozrostla ze dvou na deset robotů, chyba v trackování nákladu klesla o neuvěřitelných 80 %. Redundance většího týmu přirozeně vyhlazuje individuální zaváhání, což vede k plynulejšímu a přesnějšímu provozu.
Tím, že vědci z Oregonu odstranili berličku v podobě neustálé komunikace, vytvořili systém, který je vnitřně robustnější, škálovatelný a adaptabilní. Ukazuje to na budoucnost, kde nasazení roje logistických robotů bude stejně jednoduché jako přidání další jednotky do skupiny, aniž byste museli od základu překopávat celou síťovou architekturu. Jak stroze konstatuje zdrojový materiál: tato práce potvrzuje, že „úzkým hrdlem robotiky už není schopnost hardwaru – je jím ML infrastruktura.“












